M&TT Colloquia 2025-2026
11-05-2026 - Lecture Hall D
Mini-Symposium: Technical talk

Beyond the Calm Water Assumption: Stability, Hydrodynamics, and AI for Safer Ships
dr. inż. Tomasz Hinz
Ships are frequently introduced with simplified design assumptions, but in real-life scenarios, they operate in waves, perform manoeuvres, encounter uncertain navigational conditions, and must remain safe for those on board. In this presentation, I provide a brief introduction to Gdańsk University of Technology and the Institute of Naval Architecture, and an overview of selected ongoing research at the Institute and the Chair of Ship Hydrodynamics and Design. The focus is on research into ship safety under realistic operating conditions. I discuss work on navigation risk, surf-riding and broaching in following seas, and a possible new stability failure mode associated with evasive manoeuvres. I also demonstrate how AI can support the early-stage assessment of second-generation intact stability criteria and how open-source software can be developed to simulate individuals’ movement on deck. The talk is intended as a broad overview of research and an invitation to discuss how hydrodynamics, stability, digital tools, and AI can help us design safer ships.
04-06-2026 - Lecture Hall H
PhD presentation
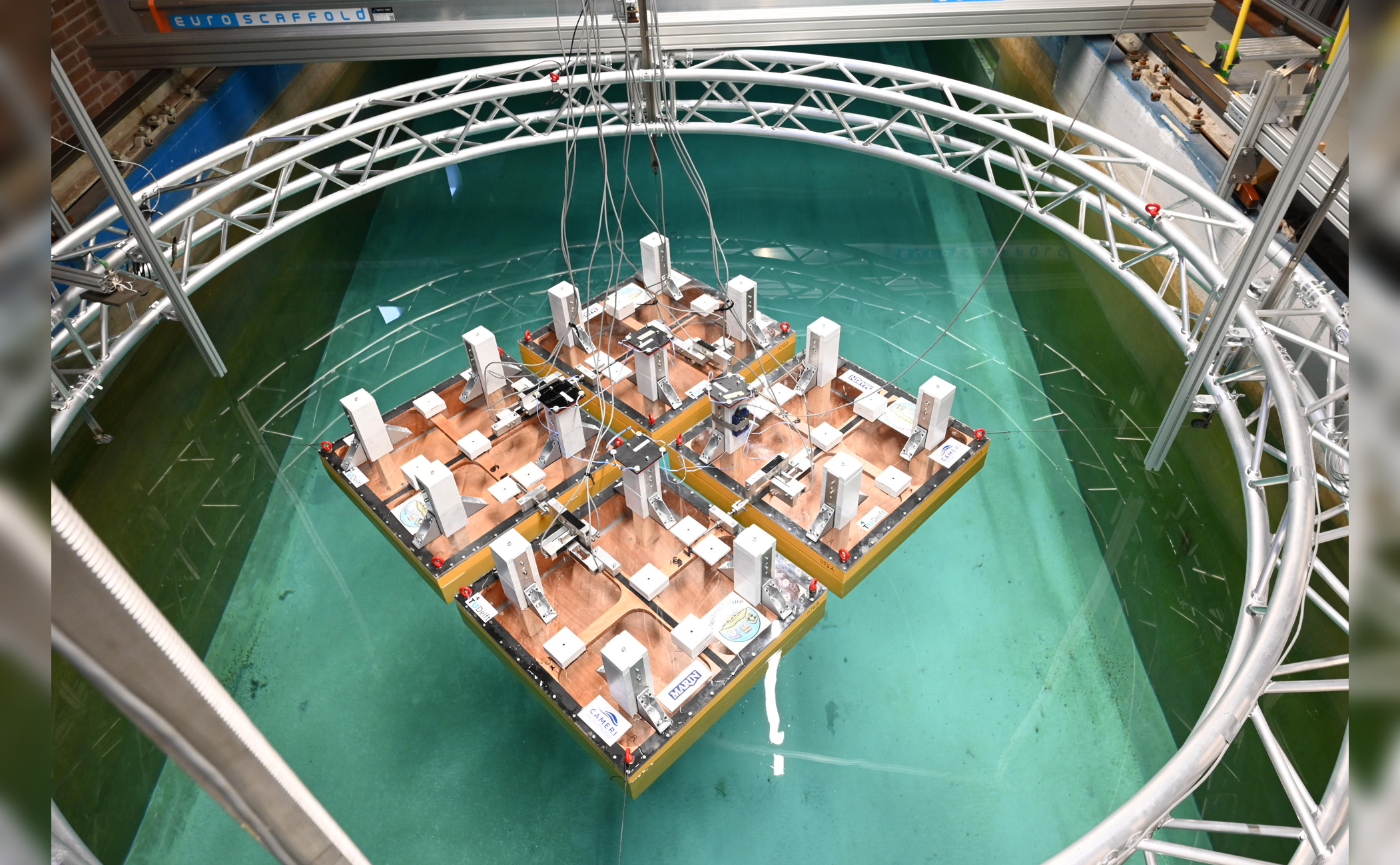
Assessing Coupled Motion Patters on Multi-body Floating Systems
Katherine Álvarez Castillo
Floating cities have been proposed as a way to relieve pressure on scarce inland space for housing and industry — but how realistic is this vision under harsh offshore conditions? At kilometre scale, wave loading can generate bending moments that challenge safety and operability. Splitting the platform into interconnected modules can reduce global bending demands, but it may also introduce strongly coupled motions and higher connector demands. This presentation shares model-scale experimental results for a 2×2 modular floating system subjected to regular waves at different incidence angles, complemented by modal insights to interpret the observed motion patterns. Which physical mechanisms drive these coupled motion patterns, and how can they be translated into connector design requirements?
21-05-2026 - Lecture Hall H
PostDoc presentation

Collaboration: TU Delft - Huisman
Bart Holtzer
As a guest researcher I’m in the unique position of working at both TU Delft and Huisman, right at the intersection of academia and industry. Although the relationship between TU Delft and Huisman goes back for many years, I try to make the collaboration even closer and more structured. In this presentation I will show you some of the projects we are working on, as well as the framework of our partnership. All with the goal: how can we successfully apply academic research in industry?
07-05-2026 - Lecture Hall H
Mini Symposium - Social Talk

A journey through books
Harleigh C. Seyffert
We all spend time reading scientific literature, but who is still reading (real) literature for enjoyment outside of work? Me! In this talk, I’ll walk a bit through my bookshelf, going through books I’ve read recently and others that I read long ago but still find impactful. The idea here is both to give a reading recommendation and to share some insights I’ve gleaned along the way that are relevant for both life at work and life beyond work.
30-04-2026 - Lecture Hall H
PhD presentation

Hydroelastic wave impact on a flexible overhang
Marnix Bockstael
Extreme wave impacts can exert high loads on maritime structures, which can lead to damage or failure. Controlled, artificially generated wave impacts are therefore important tools for the study of the expected value and variability of these events. The dynamics of extreme wave impacts involve large free surface variations and responses of the impacted structure. The hydrodynamic loads and structural response depend on their coupled interaction (hydroelasticity), which should be taken into account. I will present an experimental setup that was designed to include all of these phenomena. After an introduction to my research context, the effects of hydroelasticity on the (numerical) analysis of the physical experiment will be the main point of discussion.
30-04-2026 - Lecture Hall H
PhD presentation
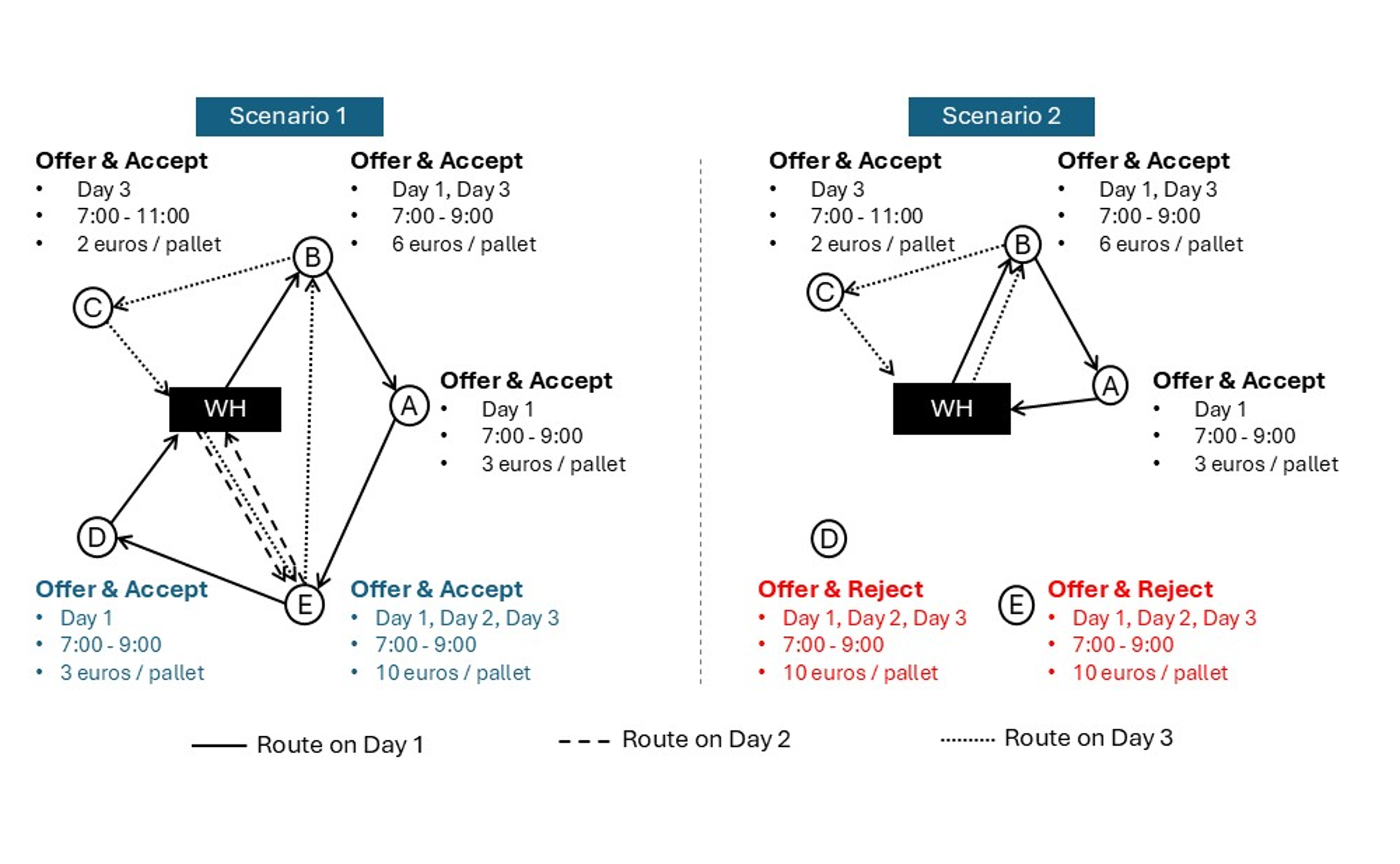
Choice-Based Periodic Vehicle Routing and Pricing for Urban Last-Mile Deliveries
Ethan Yang
In urban periodic deliveries, business customers exhibit heterogeneous preferences over price, visit frequency, timing, and time window length. Ignoring such heterogeneity leads to service designs that misalign customer needs. We propose the choice-based periodic vehicle routing and pricing problem (CB-PVRP), which incorporates stochastic customer choices into joint optimization of service offering, pricing, and vehicle routing. We formulate CB-PVRP as a two-stage stochastic mixed-integer program. The first stage determines offerings and pricing to maximize expected profit. The second stage, which embeds a bilevel structure, decides daily routing subject to revealed choices. We capture preference heterogeneity using a multinomial logit model with segmentation. We apply sample average approximation to address stochasticity and propose linear best-response sets for the bilevel reformulation. Our tailored logic-based Benders decomposition algorithm outperforms a commercial solver on solution quality and speed. By incorporating customer choice behaviors, the provider achieves higher expected profitability while customers receive improved services.
16-04-2026 - Lecture Hall D
PostDoc presentation

Tactical planning for intermodal freight transport: optimization using Graph Neural Networks
Javier Duran Micco
Logistic Service Providers (LSPs) operate in complex and highly dynamic transport systems, where decisions are influenced by uncertainty, interactions with multiple stakeholders, and large-scale networks. Supporting effective planning and adaptability in such environments remains a key challenge, so efficient optimization algorithms are needed. This research focuses on the Service Network Design (SND) problem faced by an LSP, integrating tactical planning with dynamic operational decisions. The proposed approach considers a complex operational setting, including uncertain travel times and demand, dynamic replanning decisions, and interactions between the LSP and carriers. An agent-based simulation model is developed to capture these complexities and is coupled with a metaheuristic to solve the SND. To overcome the high computational cost of simulation, a Graph Neural Network (GNN) is introduced as a surrogate model. The GNN, trained with simulation-generated data, leverages the network structure to predict both global performance (profit) and node-level indicators, which are used to guide the search process. Numerical experiments show that the proposed framework produces high-quality solutions with scalable computational effort, particularly for large-scale instances. The results highlight the potential of integrating optimization and machine learning to address complex freight transport planning.
16-04-2026 - Lecture Hall D
PostDoc presentation

Rethinking the modelling of under-resolved scales in simulations of bubbly flows
Jordi Poblador Ibáñez
Bubbly flows are central to the energy transition. Simulations are crucial to understand their behaviour and develop new technologies. However, the large amount of bubbles found in many systems and the small scales and physics that must be resolved limits the scope of current studies. This research project rethinks the state-of-the-art and proposes more accurate sub-grid models for bubble heat transfer and coalescence to bridge the scale gap and allow the study of complex multiphase systems. Therefore, taking a step further to enabling new insights of bubbly flow systems relevant to society’s engineering needs.
09-04-2026 - Lecture Hall E
Mini-Symposium - Social Talk
Choices and challenges in an academic career
a personal story of an electrical power engineering professor
Henk Polinder
As researchers in academia, we are continuously faced with choices and challenges. Do I want an academic career? What is the best next step? Am I good enough? Where and how can I make a contribution? Why do reviewers not understand my excellent work? Sometimes we have successes. Most of the time, we are struggling. During this presentation, I want to share something of my own choices and challenges. I am convinced this will give some insight into the beauty of electrical power engineering. I also hope this will stimulate thinking about how (not) to develop an academic career.
02-04-2026 - Lecture Hall H
PhD Presentation

Finding dangerous waves: predicting wave impact design loads on maritime structures
Sanne van Essen
A wave impact on a ship or offshore / coastal structure is a dynamic event that occurs when a wave hits the structure, often due to large, steep waves or wave-induced motions. These impacts can cause damage, safety risks, pollution, reduced performance, or, rarely, structural failure, so their extremes must be considered in design. However, they are difficult to predict because they are both rare and complex, requiring both high-fidelity simulations and long analysis durations to reliably quantify the associated design loads. Existing extreme value prediction methods are neither specifically developed nor adequately validated for wave impact phenomena. To address this, we introduce the Probabilistic Adaptive Screening (PAS) method, which combines copula-based dependence modelling with multi-fidelity screening and adaptive sampling. PAS efficiently predicts extreme loads by linking low-fidelity indicators to high-fidelity responses. Validation across four cases shows that it can accurately capture both weakly and strongly non-linear extremes, while significantly reducing computational cost compared to Monte Carlo methods.
19-03-2026 - Lecture Hall H
PhD Presentation
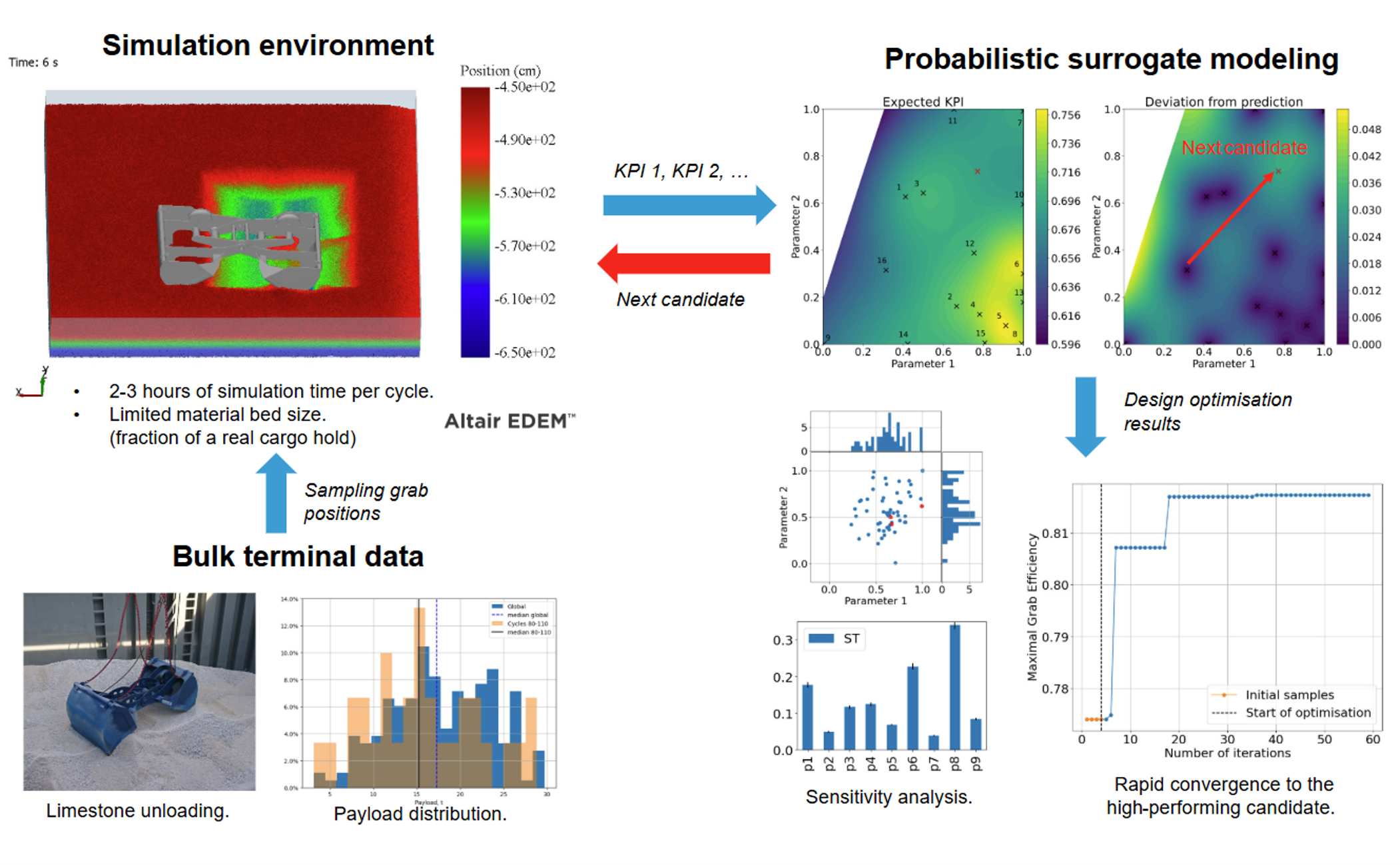
Towards efficient multi-dimensional operationally robust grab design optimisation
Mikhail Anisimov
Bulk materials such as iron ore, coal, and limestone are needed worldwide, and the vessels transporting them require fast and efficient unloading to reduce demurrage costs and improve logistics. However, there are limited opportunities when it comes to the optimisation of the operations themselves, leaving the grab design as the main lever affecting performance. Therefore, high-performing grab designs delivering consistently large payloads at each stage of unloading are essential. Still, their design optimisation remains challenging due to high simulation costs and highly variable operational conditions. This project explores the use of machine learning to guide the optimisation of grab designs more efficiently. The aim is to reduce the number of required simulations while extracting valuable engineering knowledge from the process. Attention is given to material conditions—especially the evolving surface of the bulk material—and how these can be incorporated into the optimisation framework to deliver grab designs with robust performance under real operational conditions.
12-03-2026 - Lecture Hall C
Mini Symposium - Technical Talk

How do we design and operate manufacturing systems that adapt sustainably?
Alessia Napoleone
Manufacturing systems must increasingly adapt to volatile markets, sustainability demands, and rapid technological change. This talk introduces the concepts of flexibility and reconfigurability as key mechanisms for enabling such adaptation. I outline the current state of industry—where digital technologies create new possibilities but decision making remains fragmented—and the state of research, which still lacks integrated, lifecycle aware approaches. I then present a systems engineering driven research program and illustrative examples that show how coordinated design and operational decisions can support sustainable and resilient manufacturing.
05-03-2026 - Lecture Hall J
PhD Presentation
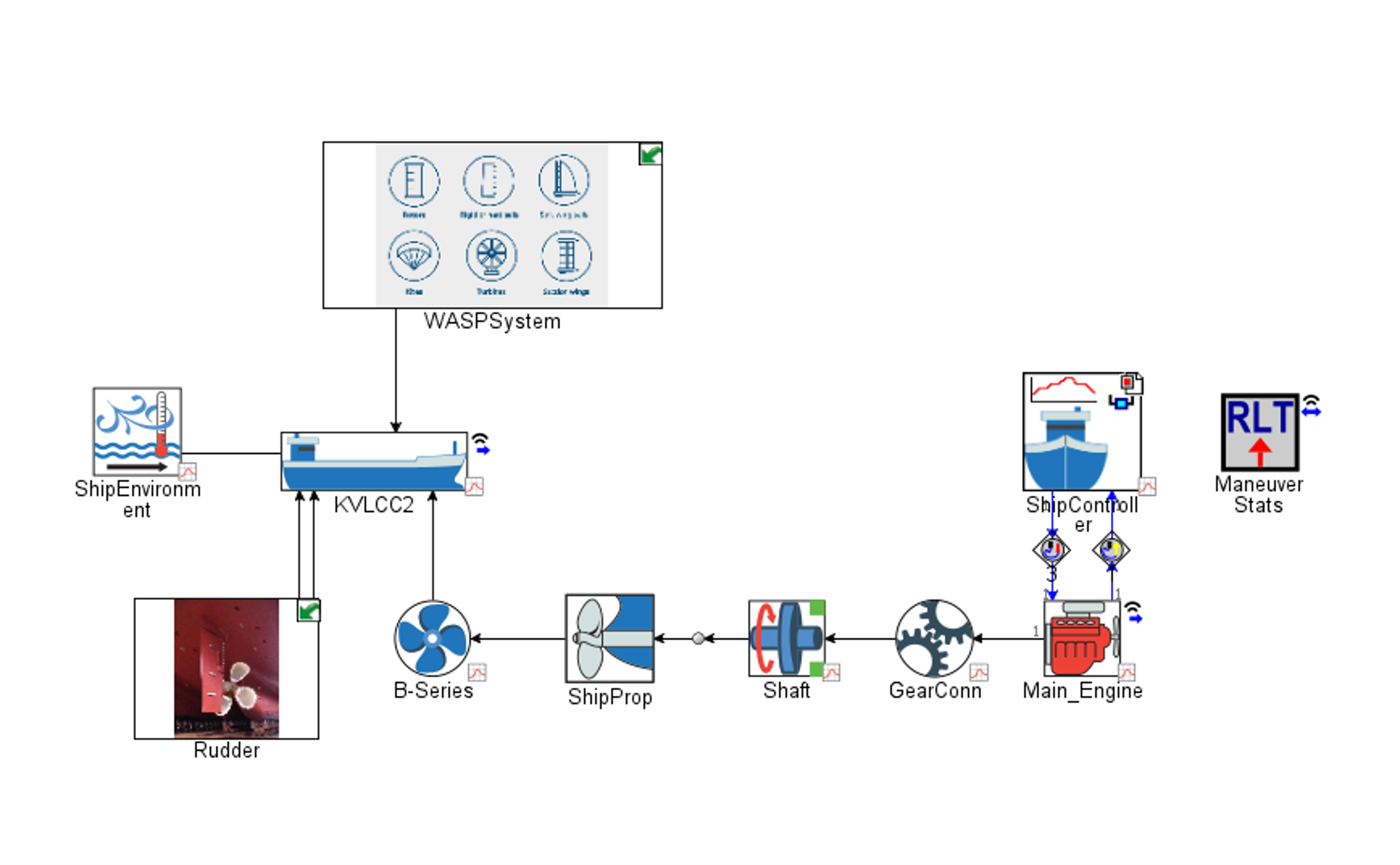
GTSuite model for Wind Assisted Ship Propulsion System, integration of wind energy and conventional powertrains
Deborah Noffke
Recently, it has become increasingly important to control pollutant emissions and reduce global warming effects in the shipping industry. In this scenario, Wind Assisted Ship Propulsion systems (WASP) emerged. Although sails on vessels are not a new concept, further research is necessary to implement these systems in the current fleet. To do so, it is important to create a model of the ship and WASP system, but also of the conventional powertrain. In this talk, an integrated model of the WASP system, the ship and the propulsion system is presented to determine the possible emissions reduction and fuel consumption savings of WASP vessels.
05-03-2026 - Lecture Hall J
PhD presentation

A First Investigation into Green Shipping Corridors: Configurational Pathways of Collaboration and Structural Factors
Chatarina Salim
As maritime decarbonisation becomes increasingly necessary, the Green Shipping Corridor (GSC) has emerged as a collaborative initiative. A Green Shipping Corridor (GSC) refers to a specific shipping route that aims to reduce emissions from its operations in and between ports through the deployment of low- or zero-emission fuels, supporting infrastructure, and collaborative efforts. Since 2021, numerous initiatives have emerged. However, their approaches differ across initiatives in terms of goals, governance structures, and implementation activities, and many lack transparency regarding their progress. This study investigates how differences in collaboration and structural factors across GSCs are associated with varying levels of development progress. The findings provide actionable insights for maritime stakeholders and policymakers on the direction for progressing GSC development.
19-02-2026 - Lecture Hall H
PostDoc Presentation

Cracks in a Hydrogen Future: Hydrogen Assisted Fatigue Crack Growth in Pipeline Steels
Anjali Jha
Hydrogen is widely regarded as a key enabler of carbon-neutral energy systems; however, its interaction with structural steels poses a serious challenge for the safe transport of pressurized gaseous H₂. Hydrogen ingress in pipeline steels can significantly accelerate fatigue crack growth under pressure fluctuations. This hydrogen-assisted fatigue crack growth (HA-FCG) is strongly influenced by environmental and mechanistic variables, such as hydrogen gas pressure and loading frequency, reflecting the coupled roles of hydrogen transport, cyclic deformation, and crack-tip fracture processes. Despite extensive efforts, the intrinsic mechanisms responsible for fatigue crack growth acceleration in hydrogen environments are still not fully understood. This work explores the development of a numerical framework for HA-FCG to help interpret experimental trends, assess the relevance of testing conditions, and support extrapolation to service-relevant regimes. The presentation introduces hydrogen embrittlement (HE) in steels, its role in HA-FCG, and how numerical modelling can contribute to a more mechanistic understanding of HA-FCG in pipeline applications.
12-02-2026 - Lecture Hall C
Mini Symposium

Research Impact: In Search of Meaning
Pooria Pahlavan
Research impact is increasingly framed through metrics - but what exactly is impact? How measurable is it? Should all scientific research be expected to lead to impact, or are there alternative forms of value? To what extent is impact correlated with skills and creativity, relative to other factors? This talk aims to challenge some of the most common conceptions of research impact through an interactive discussion.
05-02-2026 - Lecture Hall L
PhD presentation

When Steel Meets the Sea: Corrosion Fatigue Assessment of Welded Joints in Floating Offshore Wind Turbines
Punya Gowda
Maritime renewable energy structures like floating offshore wind turbines(FOWTs) are typically exposed to wave and wind induced loading conditions varying over time, introducing a cyclic response. Fatigue can be a governing limit state. For commonly applied materials like steel, the arc-welded joints typically connecting the planar and tubular structural members are fatigue sensitive because of the notched geometries; hot spots. At the same time, the environment is corrosive, affecting the welded joint fatigue performance. Since corrosion and fatigue are mechanisms accumulating damage at different time scales and are vulnerable to dissimilar influence factors, interaction and even competition of the two is a complex phenomenon. Currently, corrosion as fatigue influence factor is not incorporated explicitly as the fatigue strength parameter. During the presentation, I will present different corrosive environments and an assessment framework for corrosion fatigue of welded joints based on the Effective Notch Stress concept. This enables the formulation of a single fatigue resistance curve applicable to welded joints in both ambient air and corrosive marine environments, supporting durability-driven design of floating offshore wind turbines.
05-02-2026 - Lecture Hall L
PhD presentation
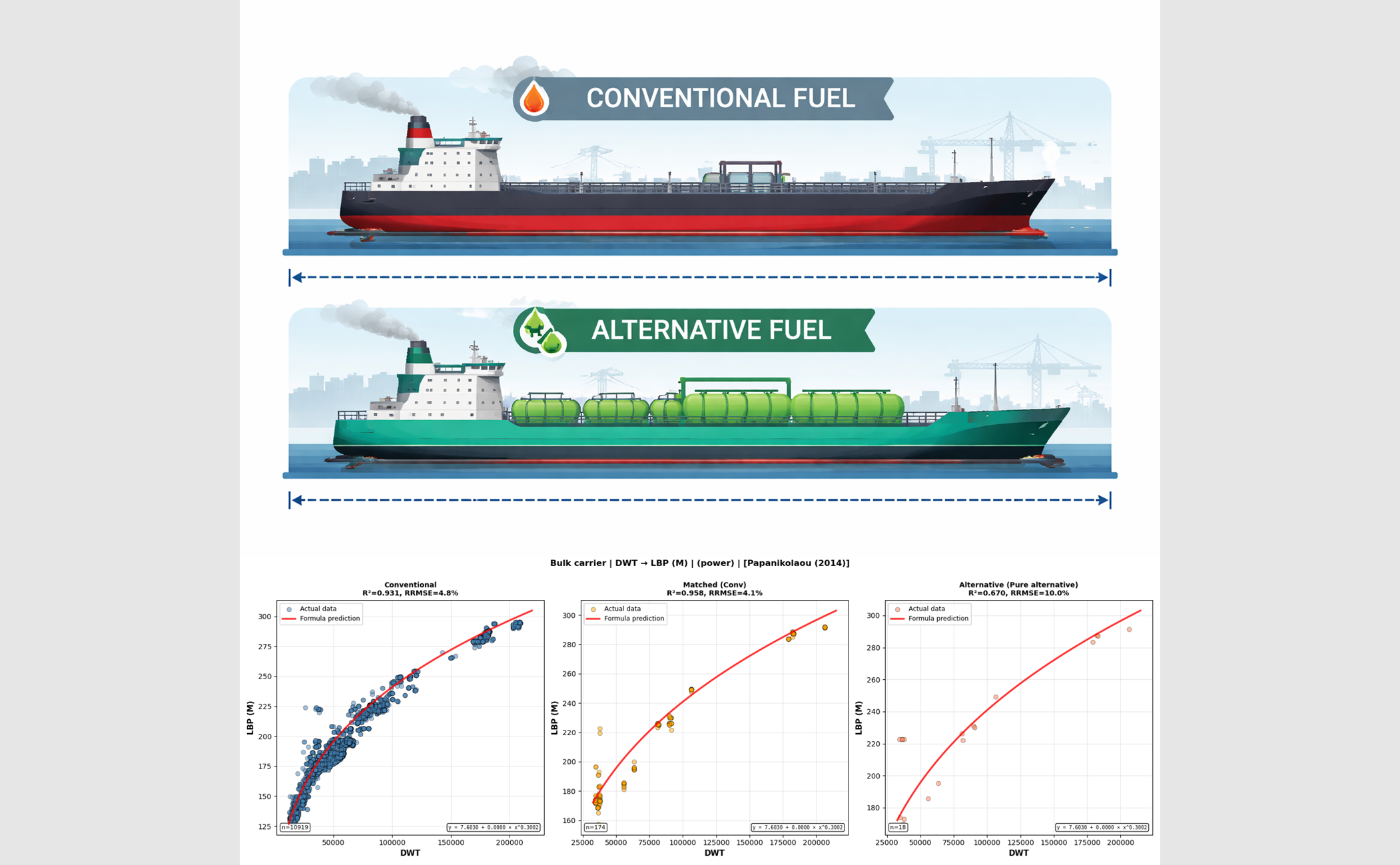
Are Conventional Regression Models Suitable for Alternatively Fuelled Ships?
Ben Noble
In order to fulfil its obligation to mitigate harmful emissions and reach net-zero greenhouse gas emissions by 2050, it is crucial that the maritime industry adopts new ship designs that run on alternative fuels. Early-stage ship design is a critical phase of the design process, as key design parameters are decided at this stage, and become costly to modify later. Typically, initial ship dimensions and design parameters are estimated using regression models derived from existing ships. These models are therefore predominantly trained on ships that use conventional marine fuel. Given that the alternative fuels being considered have significantly different properties, this raises the question of whether regression models developed for conventionally fuelled ships are applicable to the design of alternatively fuelled ships. My research investigates whether these models are suitable for the design of alternatively fuelled ships, and explores whether new models could be developed using the growing fleet of alternatively fuelled ships. In this presentation I will discuss the method used to achieve this, the models that have been investigated, and present an overview of some of the results.
22-01-2026 - Lecture Hall D
PostDoc presentation
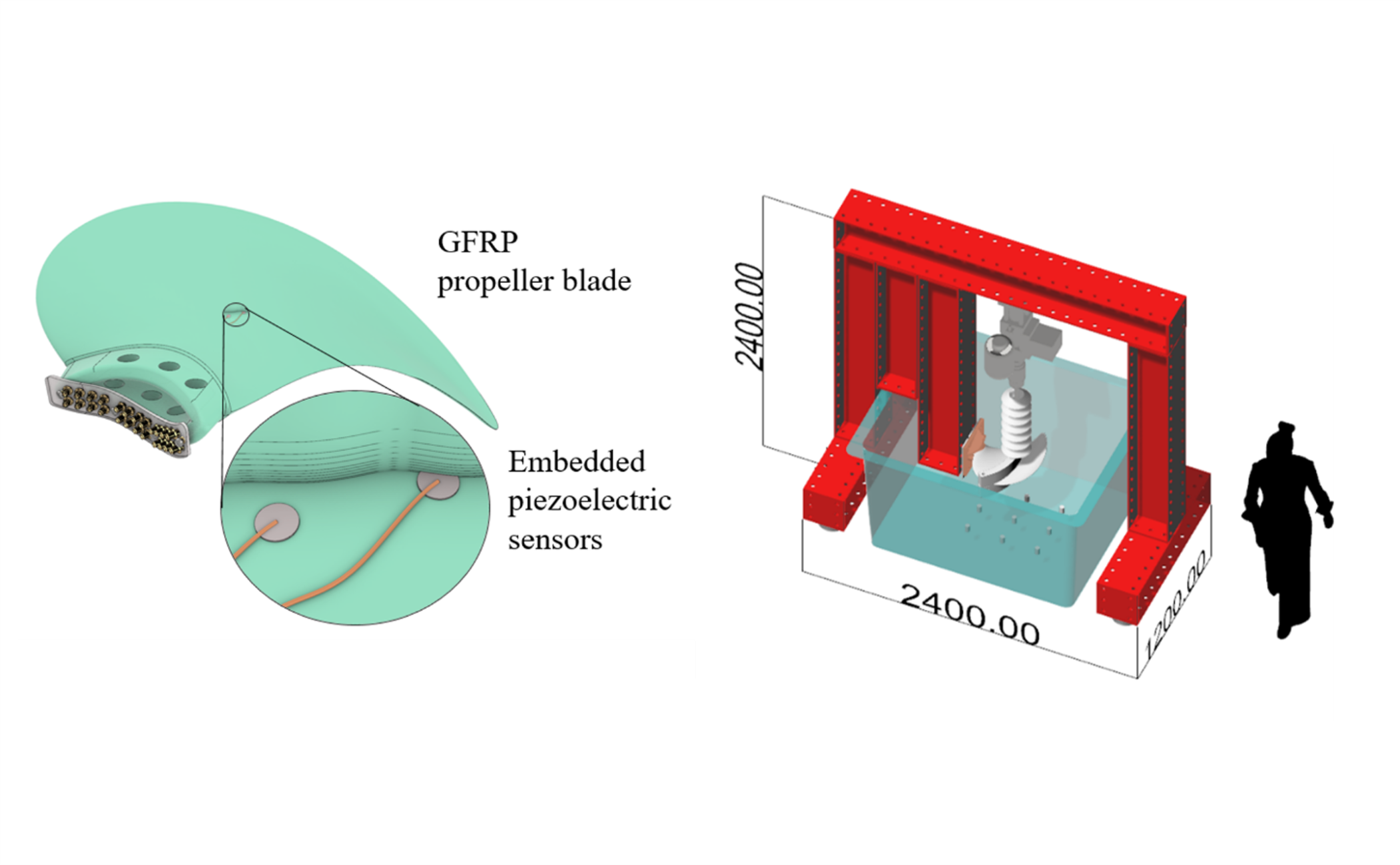
Acoustic emission monitoring of composite marine propeller blades using embedded piezoelectric sensors
Arno Huijer
To reduce both carbon emissions and underwater noise, the maritime sector is exploring flexible composite propeller blades as an alternative to traditional metal ones. These composite blades offer promising gains in fuel efficiency and noise reduction, but their fatigue life remains uncertain. My research investigates how acoustic emission monitoring can track damage in flexible composite propellers. This evolved from small-scale coupon experiments to full-scale submerged fatigue testing of propeller blades. The latter includes the recording of damage progression with embedded sensors, surface mounted sensors, and hydrophones. Early results show that these sensing methods can detect acoustic signatures of damage both before and after fatigue degradation, demonstrating their potential for reliable structural health monitoring.
22-01-2026 - Lecture Hall D
PostDoc presentation
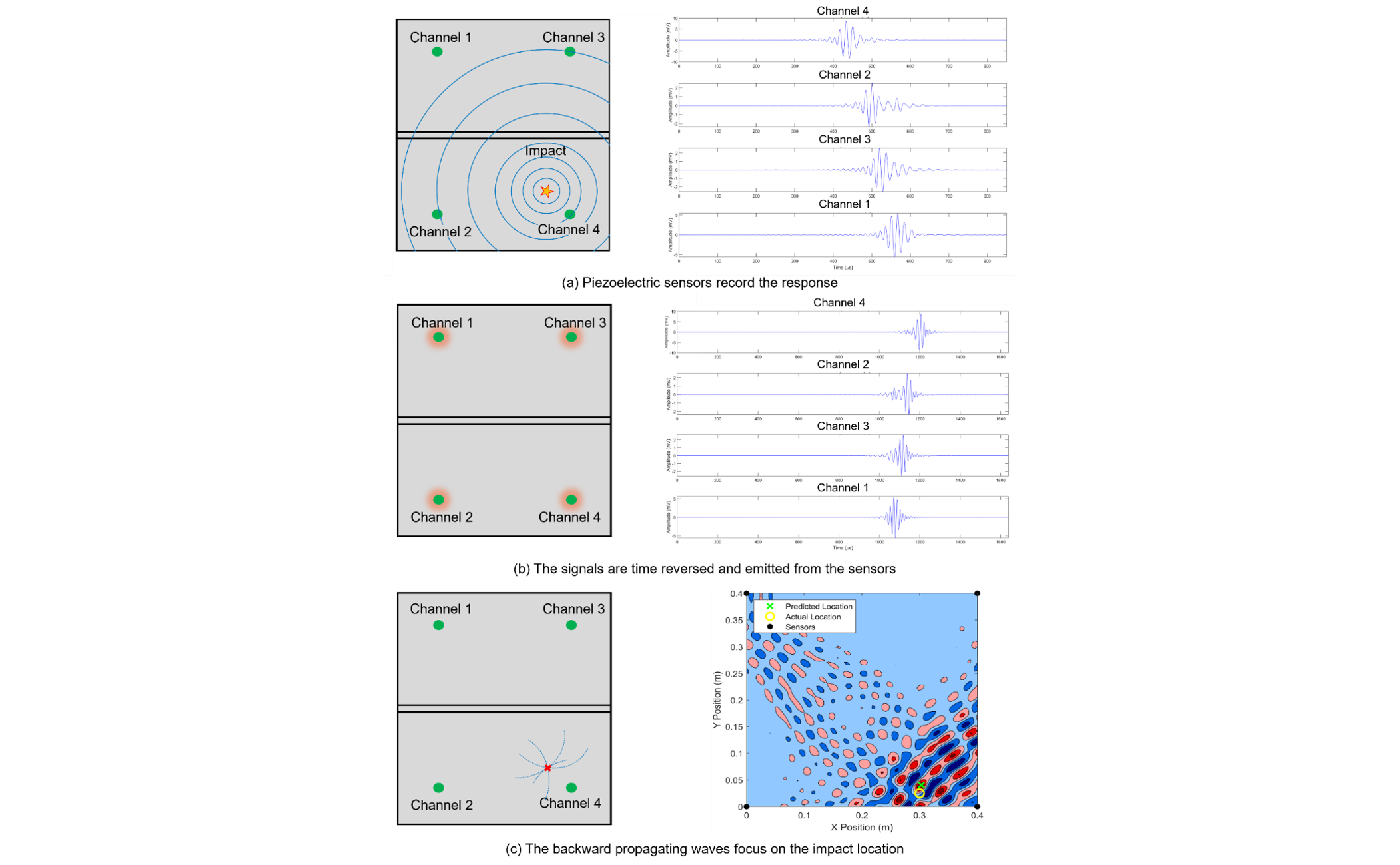
Impact Localization using Time Reversal of Guided Ultrasonic Waves
Nikolaos Papanikolaou
Marine structures operate in a complex environment and face the risk of high and low velocity impacts. Without proper detection, such events can result in severe structural damage or environmental disasters. Reliable impact identification is therefore required to ensure safety, minimize environmental risks, protect assets, and support informed decisions in structural integrity assessment. When an impact occurs part of its energy is released in the form of stress waves. In thin-walled structures, such as ship hulls, these propagate long distances as Guided Ultrasonic Waves (GUW) while carrying information about the impact source. The objective of this research is to localize impacts and estimate their energy from the recorded impact-induced GUW signals. To achieve this, an analytical framework that exploits the Time Reversal property of GUW is developed. Experimental validation indicates that passive GUW monitoring can be used to reliably localize impacts across different structural scales, highlighting its potential for future use in practical Structural Health Monitoring systems.
11-12-2025 - Lecture Hall D
PhD presentation
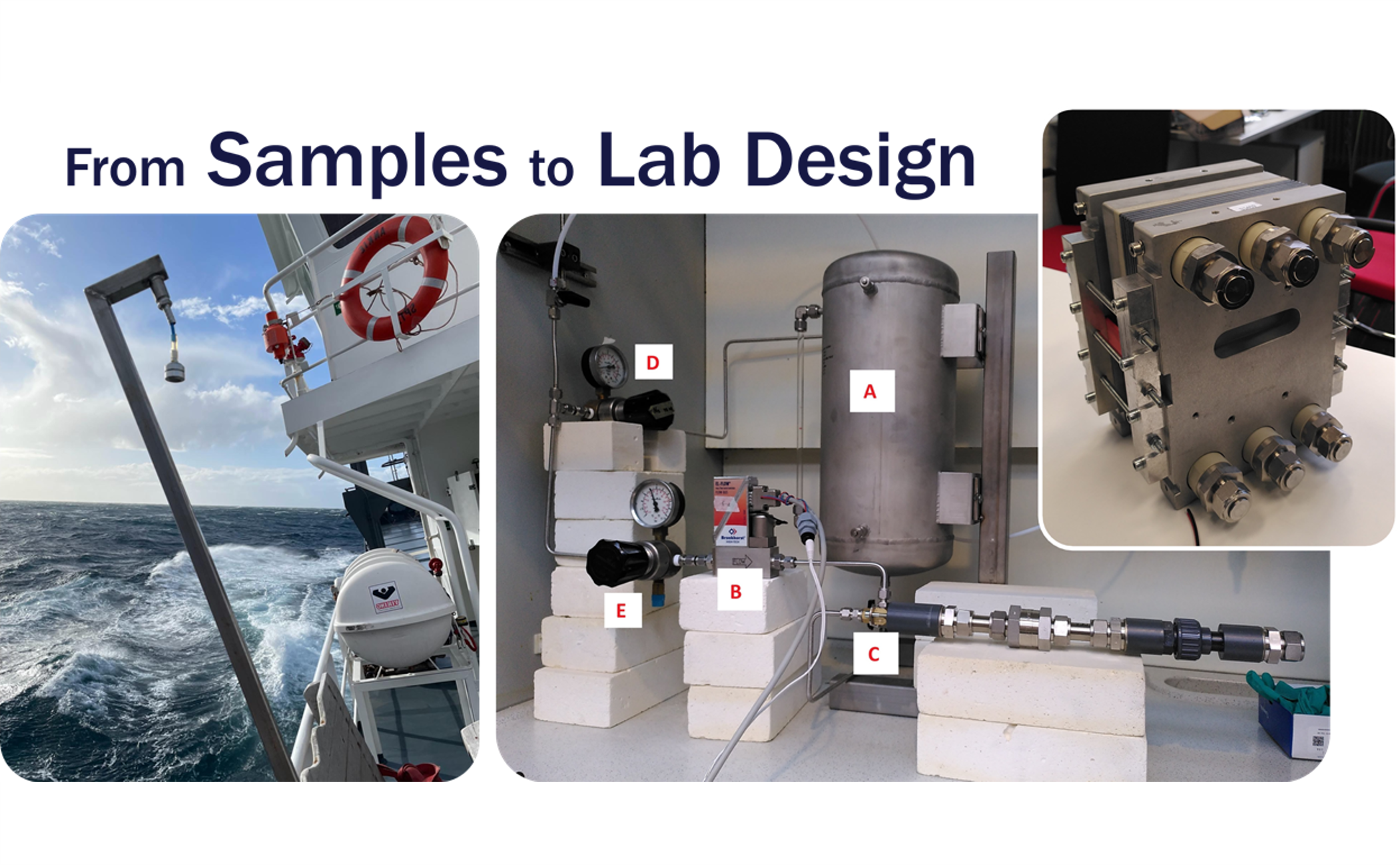
Building a maritime PEM fuel cell lab
Annabel Broer
Within the SH2IPDRIVE project, we’re exploring hydrogen as alternative maritime fuel. My research focusses on PEM fuel cells – the devices converting the chemical energy stored in the hydrogen bonds into electricity. How will the maritime environment impact the durability of these devices? We have focused on the impact of air contaminants – mainly air salinity. We conducted measurements on board a sea-going vessel and have been designing our own PEM fuel cell lab since the start of my PhD in April 2022. In this presentation I aim to give you an idea of what it means to develop a lab, be honest about challenges it involves and what I’ve learned from the process.
11-12-2025 - Lecture Hall D
PhD presentation

Experimental thermodynamic analysis of premixed marine engines
Konstantinos Kiouranakis
Defossilizing maritime transport requires replacing diesel with sustainable fuels while preserving the power density, efficiency, and robustness of marine engines. Methanol is a strong candidate due to its liquid state, good combustion properties, and scalable renewable production. However, its low reactivity necessitates reconfigures engine concepts, with premixed strategies as practical solutions for both retrofits and new designs. This PhD research addresses key knowledge gaps in understanding premixed methanol combustion for marine engines. Using in-cylinder pressure analysis as the central diagnostic tool, experimental thermodynamic frameworks are developed to connect combustion phenomena with whole-engine performance. The framework is applied to two complementary testbeds: a multi-cylinder lean-burn spark ignition (LBSI) and a single-cylinder premixed dual-fuel (PRDF) compression ignition engine. In the LBSI platform, the framework is applied to natural-gas fuel experiments to demonstrate its diagnostic utility, and provide insights as well as prepare for methanol use. In the PRDF testbed, the framework is applied to methanol-diesel PRDF operation, providing insights beyond conventional heat release analysis. A combined quantitative-qualitative approach is introduced, including a morphology-based heat release assessment that links heat release shape to the underlying combustion mechanisms. The analysis reveals distinct combustions across operating conditions and provides with a clearer understanding of methanol’s limitations and opportunities for high methanol-ratio and high-efficiency operation in marine engines. Overall, the research delivers an integrated experimental and analytical foundation for better understanding premixed methanol combustion in marine engines, providing with tools and insights to support the energy transition in maritime.
20-11-2025 - Lecture Hall L
PhD presentations

Can blowing water make a boat fly?
Vasu Krishnan
Hydrofoil craft have gained significant attention in recent years because they offer fast and efficient transport, both in dense urban waterways and in offshore environments. A key challenge for commercial use, however, is ensuring comfortable and safe operation in both calm water and waves. This requires maintaining a stable ride height, which in turn demands an effective control strategy. One promising lift-control approach uses the Coandă effect: water is blown from a modified trailing edge of the hydrofoil to increase lift. While this mechanism has been studied under steady, idealised conditions, its behaviour in waves remains largely unknown. This research investigates how unsteady inflow conditions—specifically waves—affect the forces on the hydrofoil and the performance of the blowing-based lift-enhancement mechanism. Current experiments show that the blowing mechanism increases lift in both steady water and wave conditions, and that the increase remains approximately linear within the tested range. However, challenges remain when applying this approach as a practical control method, particularly due to limitations in current theoretical models, which do not fully capture the complexities observed in real operating conditions.
13-11-2025 - Lecture Hall C
Mini Symposium - Social Talk

NAVIGATE Summer School 2025: Training researchers to innovate autonomous transport
Vasso Reppa
From the 7th to 10th of July 2027, the NAVIGATE Summer School took place at Mechanical Engineering Faculty. The focus of the school was on connected autonomous vehicles and intelligent transportation systems. With the support of the Transport & Mobility theme, Vasso Reppa (MTT Department) together with Bilge Atasoy (MTT Department), Laura Ferranti (CoR Department) and Holger Caesar (CoR Department) organized the school with several lectures given by themselves and by Sergio Grammatico (DCSC Department), Javier Alonso Mora (CoR Department) and Barys Shyrokau (CoR Department). The lectures showed the multidisciplinary research on Transport and Mobility at ME faculty, starting from perception, predictive and comfort-oriented motion planning, sensor fault management, autonomous vessel coordination, dynamic game theory, coordinated transport and logistics among others. Along with the lectures, there were several interactive sessions like poster sessions where many TU Delft researchers of the ME faculty presented their cutting-edge research, stimulating interesting discussions and a dynamic roundtable about the future of the Transport and Mobility with five panelists, Dariu Gavrilla (CoR Department), Rudy Negenborn (MTT Department), Irene Martinez (Civil Engineering & Geosciences Faculty), Jan Anne Annema (Technology, Policy and Management Faculty) and Jochem Nonhebel (DAMEN Naval). This talk will give a summary of the school, including the background of the organization and interesting feedback.
06-11-2025 - Lagerhuysch
Postdoc Presentation

Virtual Sensor-Informed Motion Planning for Safe Autonomous Waterborne Navigation
Nikos Kougiatsos
The European Union’s ambition for climate neutrality by 2050 has accelerated the development of Autonomous Surface Vessels (ASVs), which hold promise for safer, more efficient, and cost-effective waterborne transport. Autonomous Navigation is enabled by three interconnected systems, the Guidance, Navigation, and Control (GNC) systems. Guidance is a critical system used during the vessel's navigation, designed for objectives such as the planning of a safe path to be applied by the ASV, and collision avoidance. The occurrence of faults in the navigation system can potentially affect the guidance, due to their interconnections, and lead to accidents. Moreover, environmental disturbances like ocean currents should be taken into consideration in the proper design of the guidance system. In this presentation, we will discuss the development of a novel Virtual Sensor-Informed motion planning scheme, with built-in resilience against sensor faults and environmental disturbances.
06-11-2025 - Lagerhuysch
Postdoc Presentation
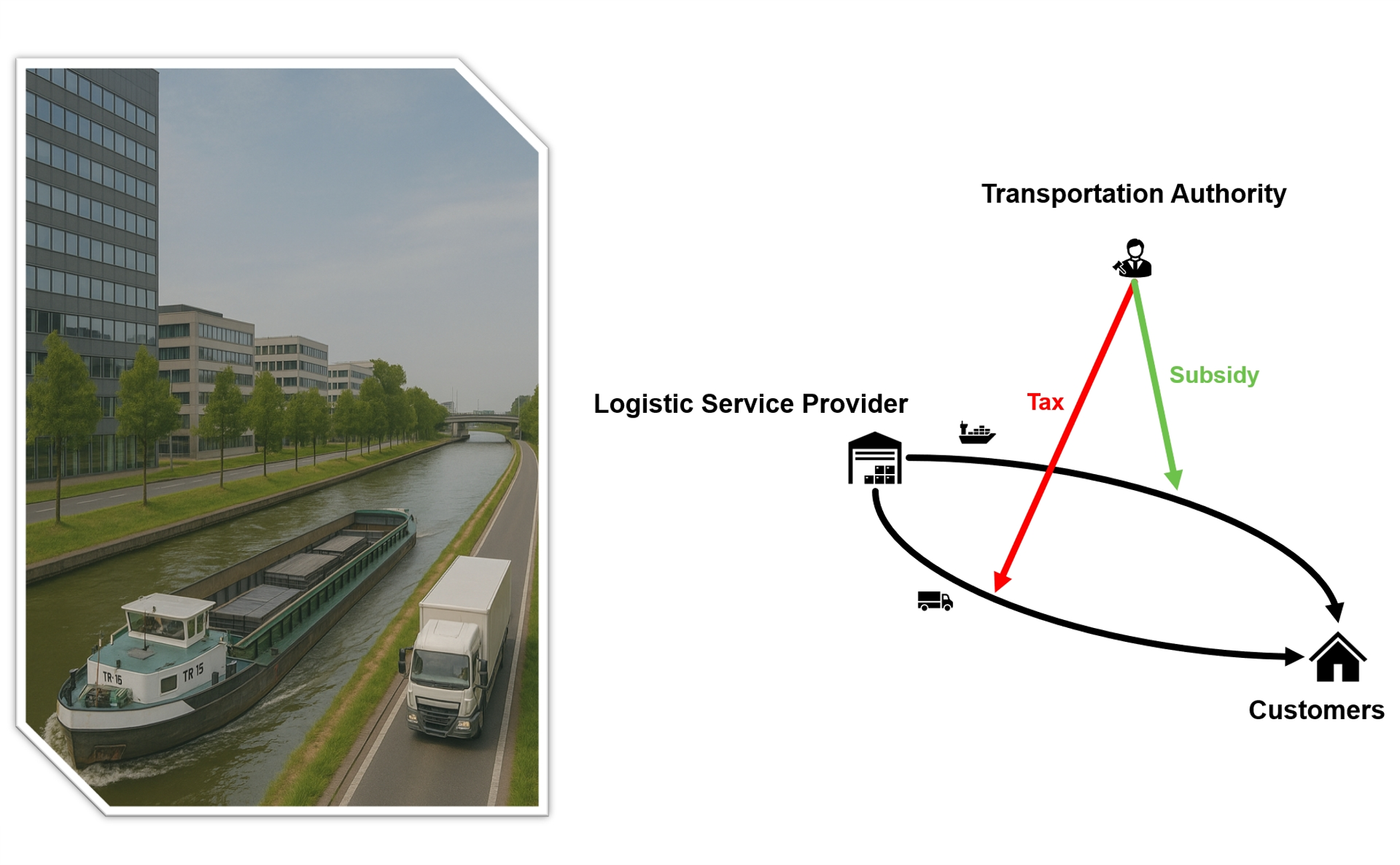
Optimal Taxes and Subsidies for Sustainable City Logistics: A Multi-Agency Bilevel Game-Theoretic Framework
Mingye Luan
Urban freight transportation contributes substantially to congestion, pollution, and inefficiencies in cities. To mitigate these adverse effects, policymakers are increasingly exploring incentive-based mechanisms that promote the adoption of sustainable transportation modes, such as inland waterways and rail-based scheduled services. The effectiveness of such policies critically depends on the strategic interactions among multiple decision-making agencies. A systematic understanding of these interactions is essential for designing policies that are socially beneficial, economically viable, and operationally feasible. This study proposes a multi-agency game-theoretic framework to analyze incentive-based urban freight policies involving three key agencies: transportation authorities, logistics service providers (LSPs), and end customers. The model captures the interdependence among regulatory interventions, LSP logistics and pricing decisions, and customer choice behavior. Specifically, we consider an urban context where the transportation authority levies road usage taxes and subsidizes sustainable modes to alleviate congestion and emissions. LSPs respond by optimizing routing and pricing strategies, while customers make service selections based on a utility-maximizing logit model that accounts for price, frequency, mode preferences, and reliability. We develop a bilevel game-theoretic structure: the upper-level models the authority's decision problem—setting road tax rates and sustainable service subsidies under a limited budget—while the lower-level captures market equilibrium among LSPs and customers. LSPs maximize profit by selecting transportation modes and setting prices; customers respond via a discrete choice model. We consider both cooperative and competitive interactions among LSPs, exploring outcomes under different market structures such as Nash and Stackelberg equilibria.
23-10-2025 - Lecture Hall E
PhD Presentation
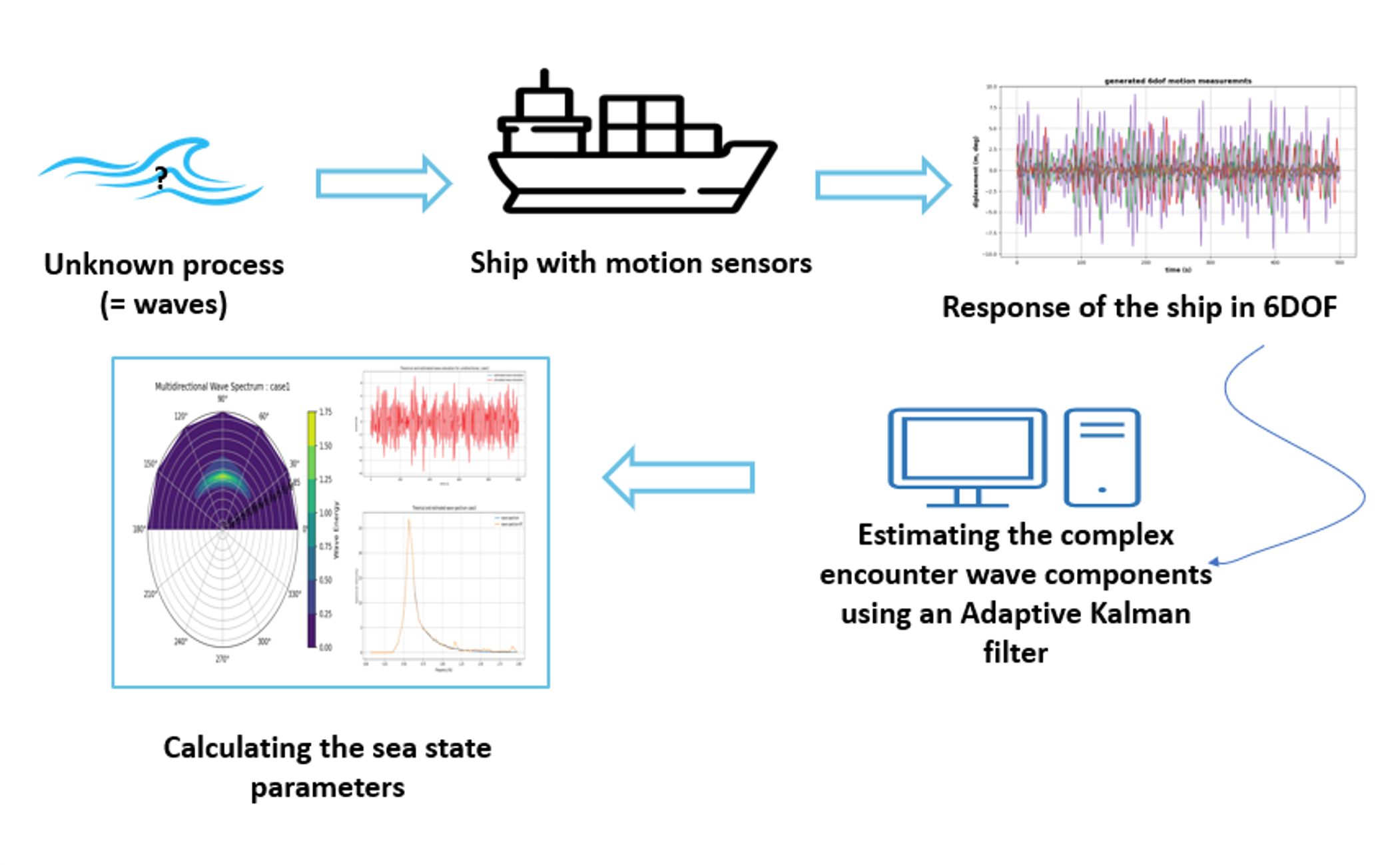
Sea State Estimation from Ship Motions using an Adaptive Kalman Filter with the Inclusion of Varying Forward Speed
Ryane Bourkaib
Knowing the sea state in real time is important for safe and efficient ship operations. During this M&TT Colloquia presentation, I will present an Adaptive Kalman Filter to estimate wave elevation and sea state parameters, such as significant wave height, peak period, and wave direction, from noisy ship motion data. The method includes the vessel’s forward speed to better reflect real conditions and is tested on simulated ship data. Results show that the approach can estimate the wave spectrum quickly and with reasonable accuracy, making it promising for real-time applications.
23-10-2025 - Lecture Hall E
PhD Presentation
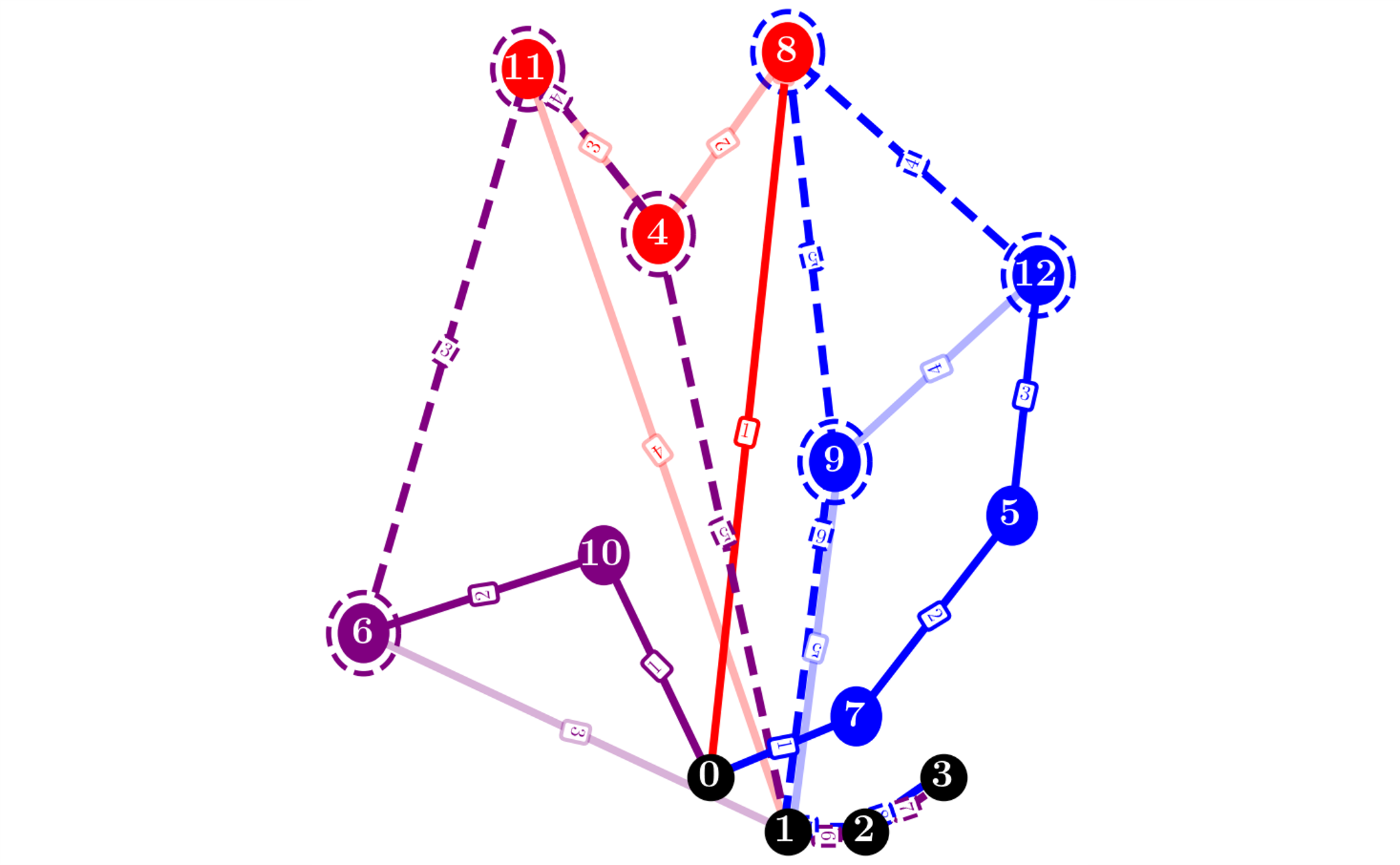
Finding resilient operational solutions for VRP with vehicle breakdown using stochastic programming
Karel Scheepstra
Decision making in logistic processes is challenging due to several factors. For example, informed (investment) decisions over different timescales (e.g. network design, fleet properties), require estimates of utilization as a result of future demand in an unknown environmental setting. Subsequently, decision freedom is to some extent limited by the output of decisions that were made in an earlier stage (e.g. the decided network determines the available routes). Additionally, logistic practices in today's economies of scale have been tailored to accommodate large scale logistics (e.g. through standardization (shipping containers), or simply through large transportation networks). As a result, logistic providers possess more decision freedom to find minimal cost solutions. However, at the same time this larger decision freedom also leads to optimization problems that become untractable with increasing size such as the combinatorial problems of vehicle routing and scheduling. This work focuses on the fact that some external influences cannot be analytically represented and their impact can only be observed as the logistic operations are realized (e.g. disruptions due to weather conditions, vehicle breakdown, or network blockage). A stochastic programming approach is used to study the effect of resilient operational planning strategies on a vehicle routing problem that is subject to vehicle breakdown with respect to different objectives and constraints. The goal is to obtain insights about implementing different operational redundancies (e.g. time buffers) with respect to different problem settings.
16-10-2025 - Lecture Hall E
Mini Symposium - Technical Talk
Data Driven Decision making for the Maritime Industry
Roy de Winter
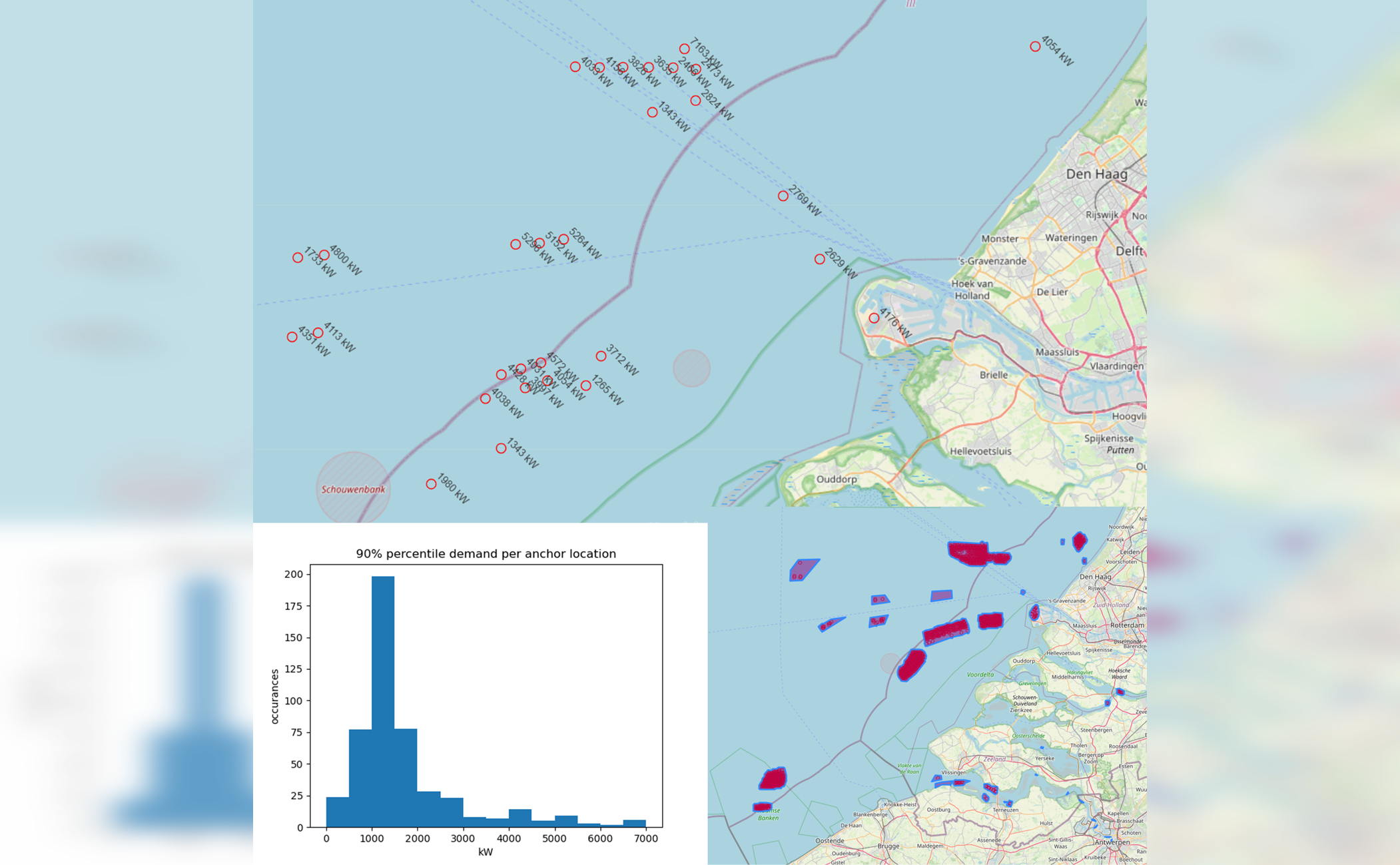
As we speak, the entire world fleet and the environmental conditions they are operating in are continuously monitored by AIS transceivers, (onboard) sensors, and satellites. The main characteristics of these vessels can be retrieved from shipping registers, databases, and classification societies. More data about ships and their environment is readily available now than ever before. Unfortunately, naval architects, operators, and policy makers rarely exploit this data to its fullest extent. During this M&TT Colloquia presentation, I aim to show you some examples on how data analysis can be used to improve ship designs, ship operations, and how we can use it to inform policymakers.
02-10-2025 - Lecture Hall E
PhD presentation
Dynamic Modeling, Parameter Identification, and Control of PEM Fuel Cells for Maritime Applications
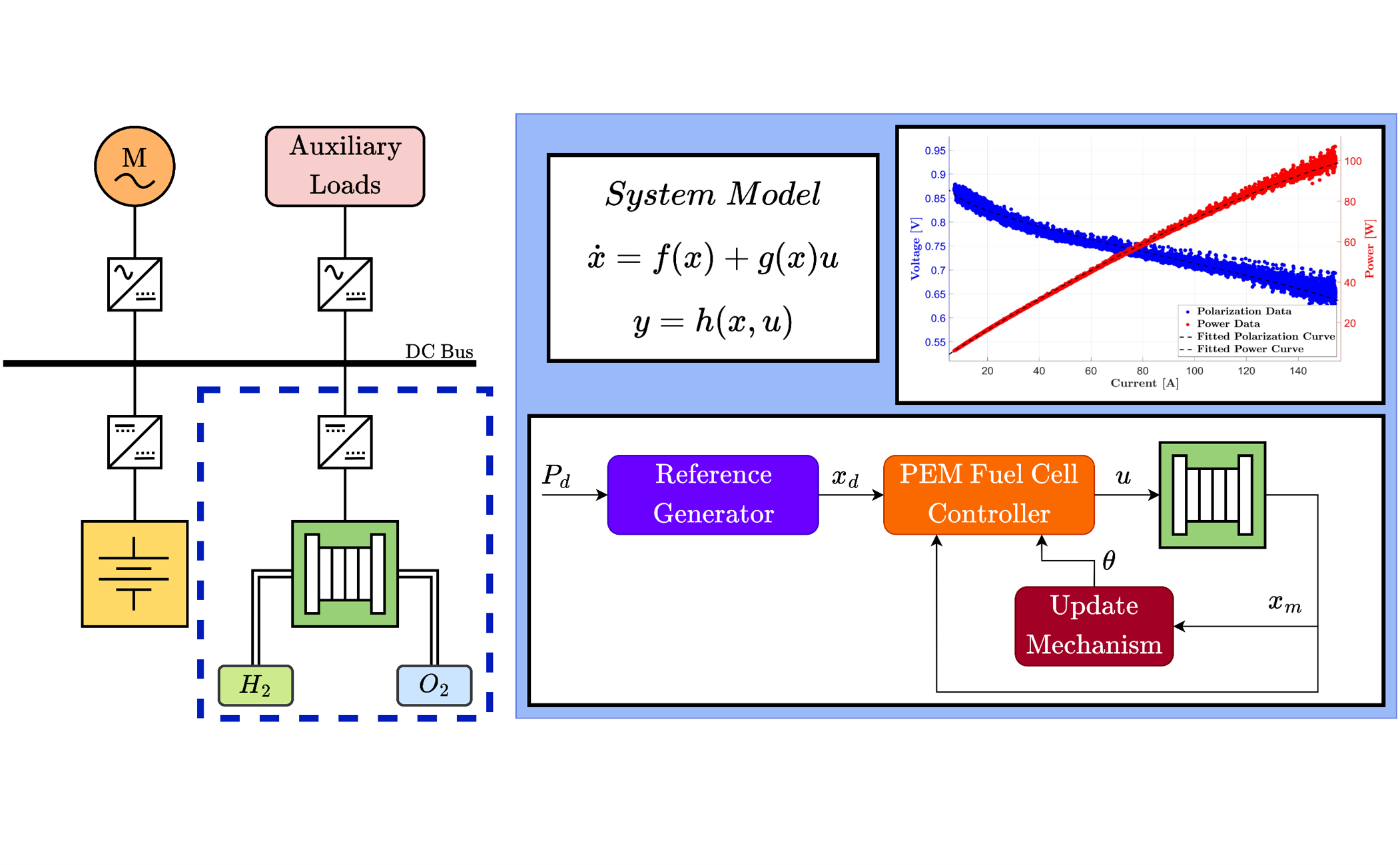
Ege Ceyhun
The decarbonization of the maritime industry requires efficient and reliable power and energy systems that can operate under demanding conditions. Proton Exchange Membrane (PEM) fuel cells are a promising zero-emission solution for ships, offering high efficiency and flexibility, but their integration into maritime applications depends on accurate system modeling and carefully designed control strategies. In this work, a control-oriented dynamic PEM fuel cell model is developed to represent the essential electrochemical, thermal, and flow processes with the minimum number of states. The parameters of the model are identified using the collected data from the experiments, which provides a connection between theoretical formulations and practical system behavior. The identified model is used for the design and comparison of different control strategies, addressing key objectives such as state tracking. Future work will extend this framework by comparing additional control approaches relevant to maritime operations, enhancing the model to capture further dynamic phenomena and integrating it with a battery model to design different energy management strategies.
18-09-2025 - Lecture Hall J
PhD presentation

Safe Autonomous Navigation in Inland Waterways: Results from Diagnosis and Control
Abhishek Dhyani
Autonomy and digitalisation are paving the way for a safer, cleaner, and efficient inland waterway transportation system. The benefits of smart shipping include making the job safer for the human crew, reducing fuel consumption and better utilisation of the inland waterways. New challenges must, however, be addressed first to ensure that the underlying technologies can be incorporated safely. In this presentation, I will discuss some results involving model-based design methodologies for ensuring safer autonomous navigation, namely: robust vessel maneuvering modelling and identification, multiple sensor fault diagnosis and autonomous control system design. The resulting algorithms prioritise safety, robustness and fault tolerance in the system design and onboard decision-making.
18-09-2025 - Lecture Hall J
PhD presentation
Modular Energy Management for Fuel Cell-Battery Shipboard Microgrids
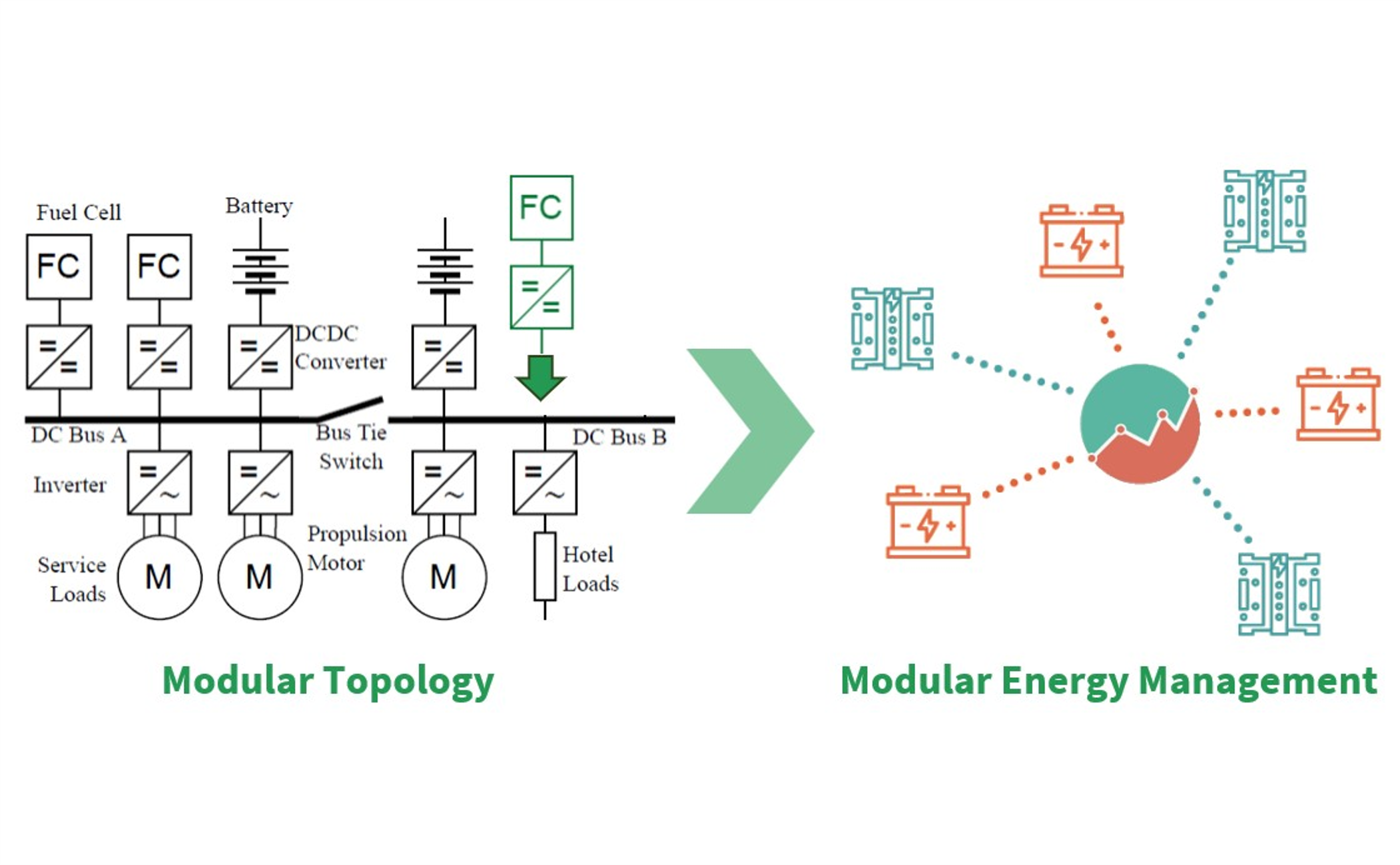
Timon Kopka
The electrification of ship power systems plays a central role in the mobility transition towards sustainable transport solutions. It allows the integration of various power sources, energy storage systems, and intermittent generation. An increasing number of components with distinct characteristics shapes the notion of a shipboard microgrid which benefits from a modular approach in its design to reduce costs and uncertainties. DC distribution facilitates the modular design by simplifying the control, and, combined with power electronics interfaces, increases the controllability of power flows in the system. To handle the increasing system complexity, we propose a distributed and predictive energy management approach, addressing the modular topology of future shipboard power systems and leveraging load power forecasting. Preliminary investigations show that a distributed, predictive energy management reaches a similar performance as a centralized implementation. For a modular shipboard power system, the proposed approach decreases both fuel and degradation costs with increasing performance gains for longer prediction horizons.