M&TT Colloquia 2022-2023
Investigation into surface roughness inspired by large aquatic animals: a hydrodynamic perspective
Jonah Massey June 22th, 2023, 16h15, Lecture Hall C
We will present the effects of surface topography on the flow and performance of a Self-Propelled Swimming (SPS) body. We consider a thin flat plate with an egg-carton roughness texture undergoing prescribed undulatory swimming kinematics. We will show the nonlinear interaction between roughness and kinematics that stretch beyond a simple increase, or decrease, in drag and will illustrate that roughness studies on static shapes do not transfer directly to unsteady swimmers.
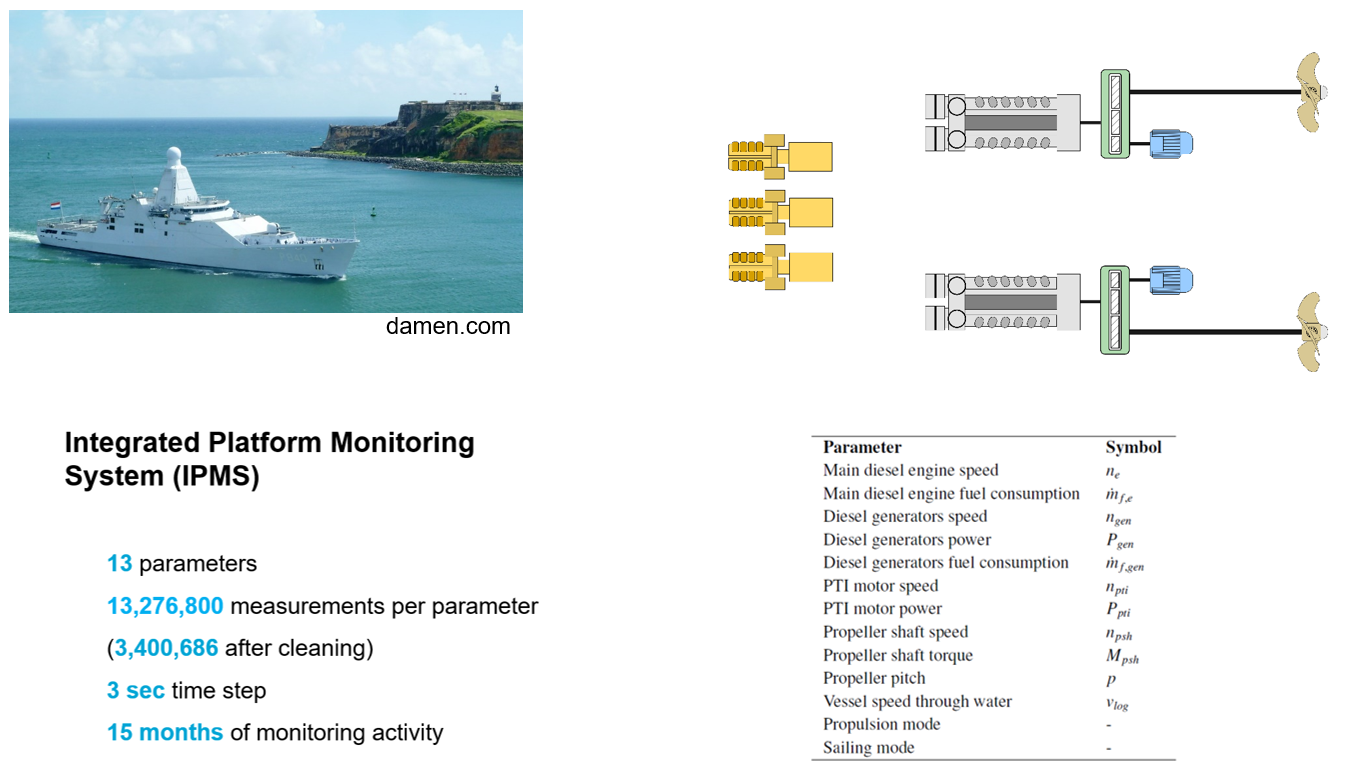
Operational data and ship energy performance
Nikos Vasilikis June 22th, 2023, 16h15, Lecture Hall C
The International Maritime Organization (IMO) has set an ambitious goal to cut greenhouse gas emissions in half by 2050 compared to 2008. In this direction a number of energy assessment measures has already been introduced, their effectiveness though to bring carbon savings in real world operations is under question. The increasing availability of high frequency operational data and research in data-driven techniques make it possible to quantify operational and environmental uncertainty related to actual operation at sea and assess the energy performance of existing and new ships under realistic sailing conditions.

Key Challenges on the Road to Green Shipping
Jeroen Pruyn June 15th, 2023, 16h15, Lecture Hall A
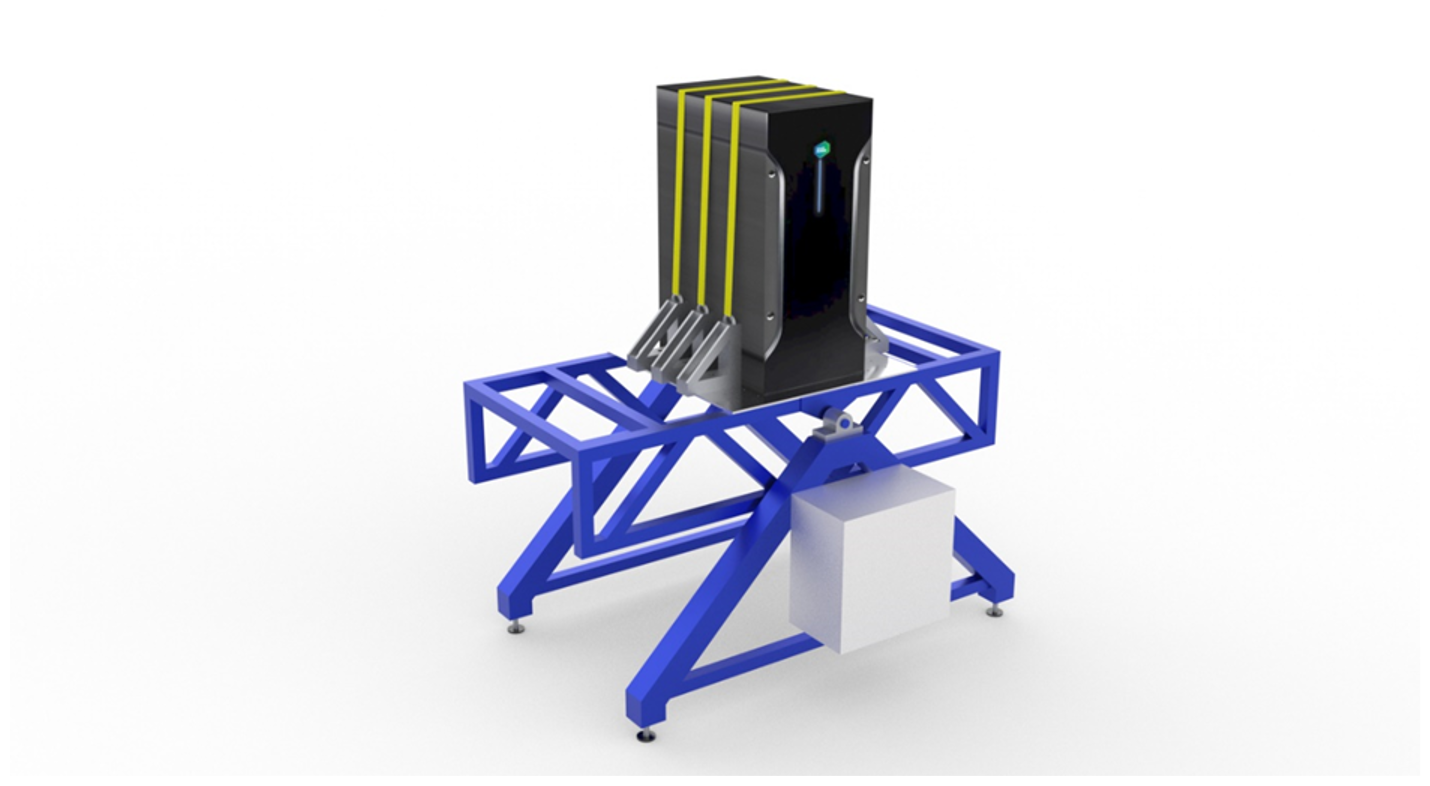
SOFC system exposed to ship motions: Experimental Evaluation of an SOFC System Exposed to Inclinations due to Ship Motions
Berend van Veldhuizen June 8th, 2023, 16h15, Lecture Hall K
In this session, I hope to bring many disciplines of our department together in one presentation. Solid Oxide fuel cells are considered as a potential solution to reduce shipping emissions. Since they are mainly used in stationary applications, it is not clear what the effect of ship motions is on the operation and safety of the system. A SOFC system is operated on an inclination platform that emulates ship motions, to evaluate the influence of static and dy-namic inclinations on the system’s safety, operation, and lifetime .Ship design, system engineering, sustainable power generation, ship motions and control architectures find common ground in this presentation about the inclination experiment.
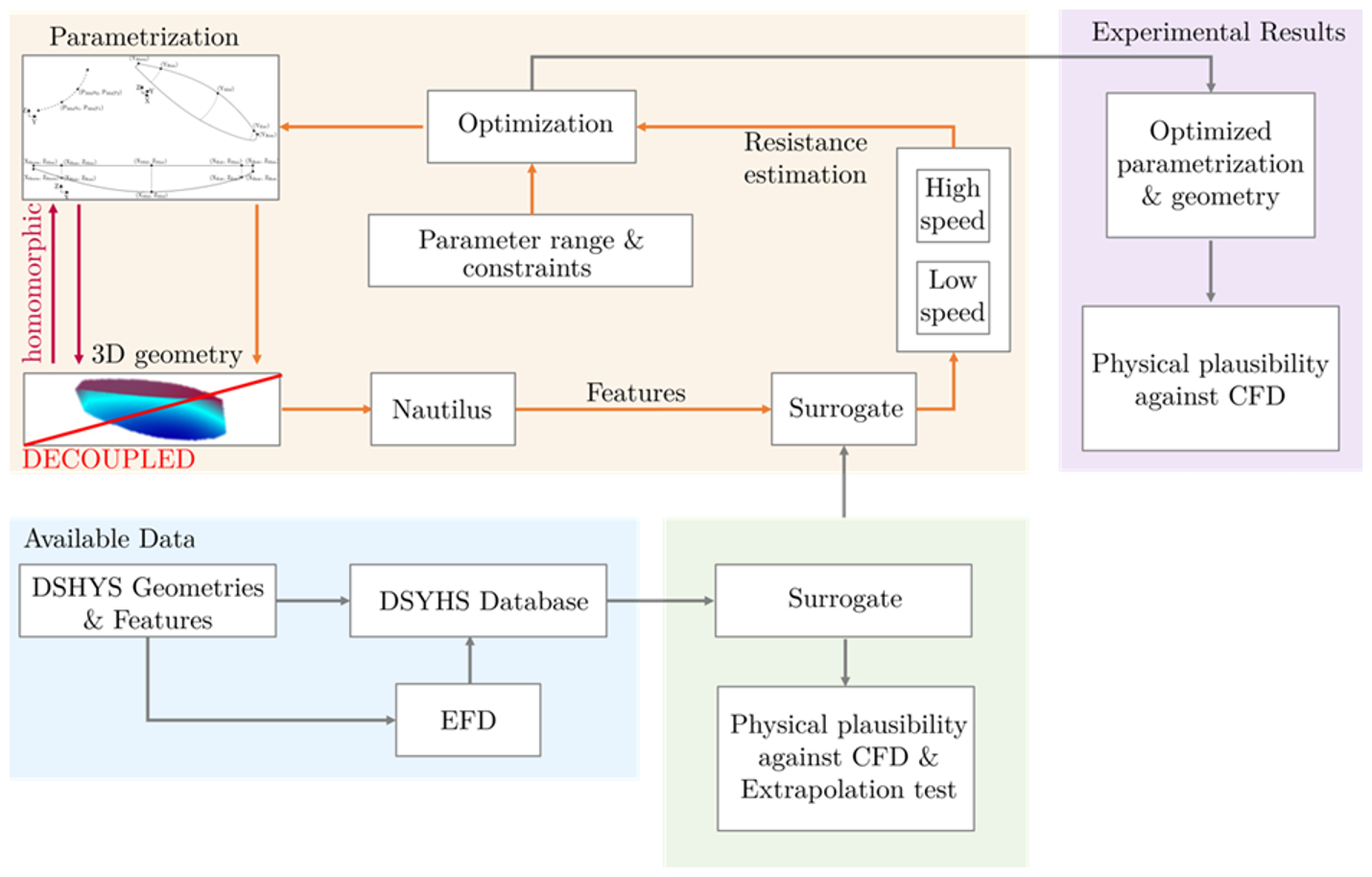
DDMs for Yacht Hull Resistance Optimization: Data-Driven Models for Yacht Hull Resistance Optimization: Exploring Geometric Parameters Beyond the Boundaries of the Delft Systematic Yacht Hull Series
Jake Walker June 8th, 2023, 16h15, Lecture Hall K
The presentation describes a new decoupled approach to vessel hull resistance optimization, that reduces the need for human intervention, does not require extensive computational requirements to build a dataset, and can work well in a number of different scenarios. The method leverages parametrization of the Delft Systematic Yacht Hull Series (DSYHS), allowing Data-Driven Models (DDMs) to be directly trained on DSYHS's Experimental Fluid Dynamics (EFD) data, eliminating the need for new EFD and Computational Fluid Dynamics (CFD). Results show that this approach matches state-of-the-art CFD models' performance, even in extrapolating conditions, while maintaining physical plausibility. The research also validates the potential of optimizing hull resistance beyond the DSYHS parameters via state-of-the-art CFD.

Industry, academia, or both: Lessons from an indecisive researcher
Carey Walters April 13th, 2023, 16h15, Lecture Hall D
As MTYP is mainly aimed at PhD candidates and post-docs, I assume that many of you may be thinking of the next career step. Do I want to stick with academia, or should I go to industry? What about going to industry first, and then back to academia? I would like to use this symposium as an opportunity to talk about some of my experience working in industry for four years, returning to academia (for my PhD), then returning to industrial research (TNO), and now back to academia. I hope to bring some insight into what each environment brings, along with its advantages and disadvantages. I can also comment on the combination of both. I will also go a little bit into similarities and differences between work in the US versus the Netherlands.
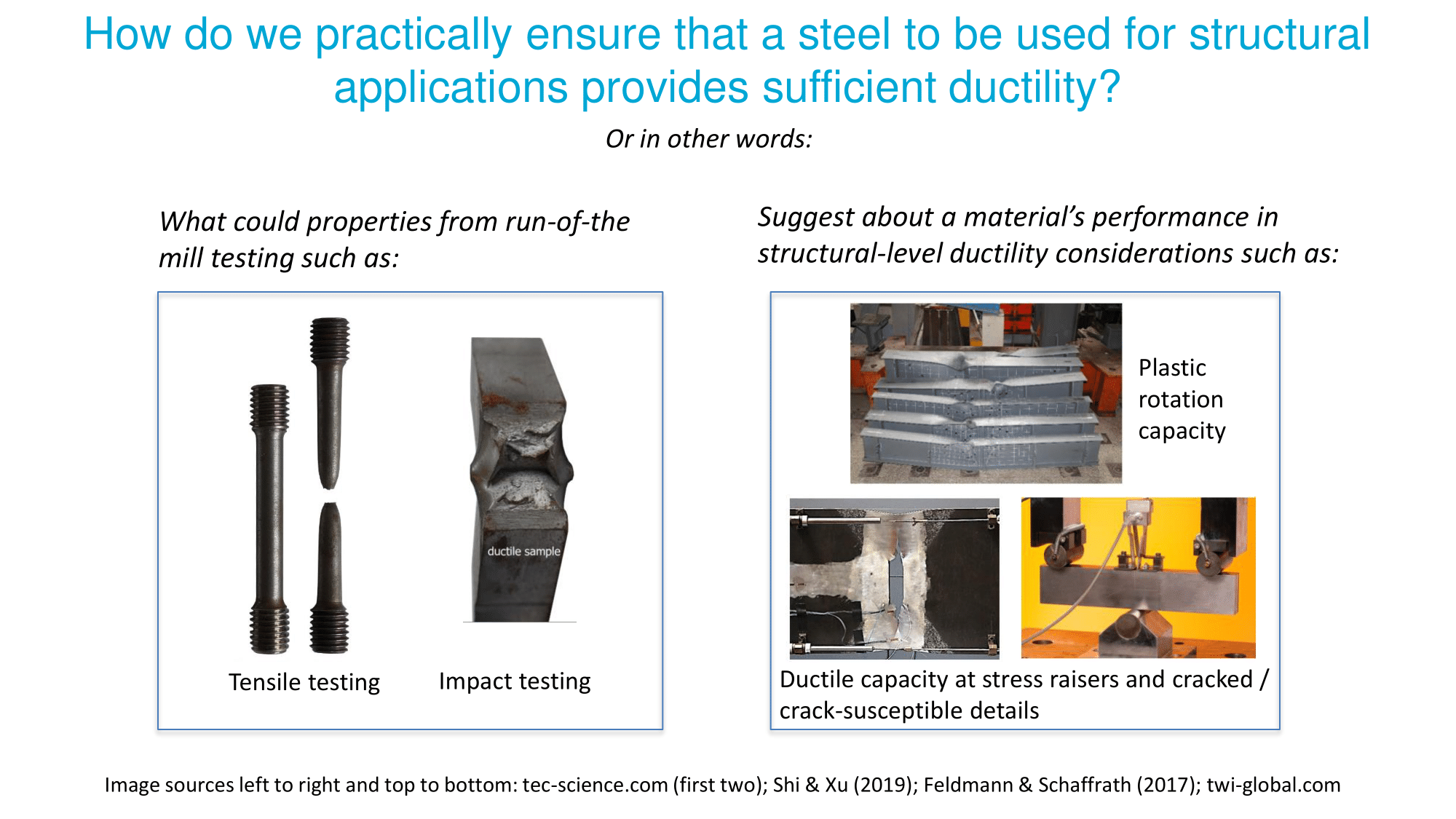
Seeking the limits of the ductility requirements for the safety of high-strength steel structures
Wei Jun Wong April 6th, 2023, 16h15, Lecture Hall J
In various offshore, maritime and civil engineering standards for steel structures, upper limits on the ratio of the yield strength to the tensile strength and lower limits on fracture elongation are stipulated as provision for ensuring sufficient deformation capacity before ultimate failure. Such requirements deter the use of higher-strength steels (typically strength > 690 MPa), which inherently have a high yield-to-tensile strength ratio. I will first briefly present the background for the existing rules, then discuss my current work towards a better understanding and prediction of structural ductility and towards finding the acceptable limits of such requirements. There is more than one relevant mechanism, but the focus will be on the mechanism of ductile fracture which I am currently working on, and how I hope to gain deeper insight into any relationships or correlations of the run-of-the-mill physical properties (e.g. strength, impact energy elongation) with structural-level ductility and ductile fracture toughness (i.e. the properties the existing rules mentioned above are considered to account for).
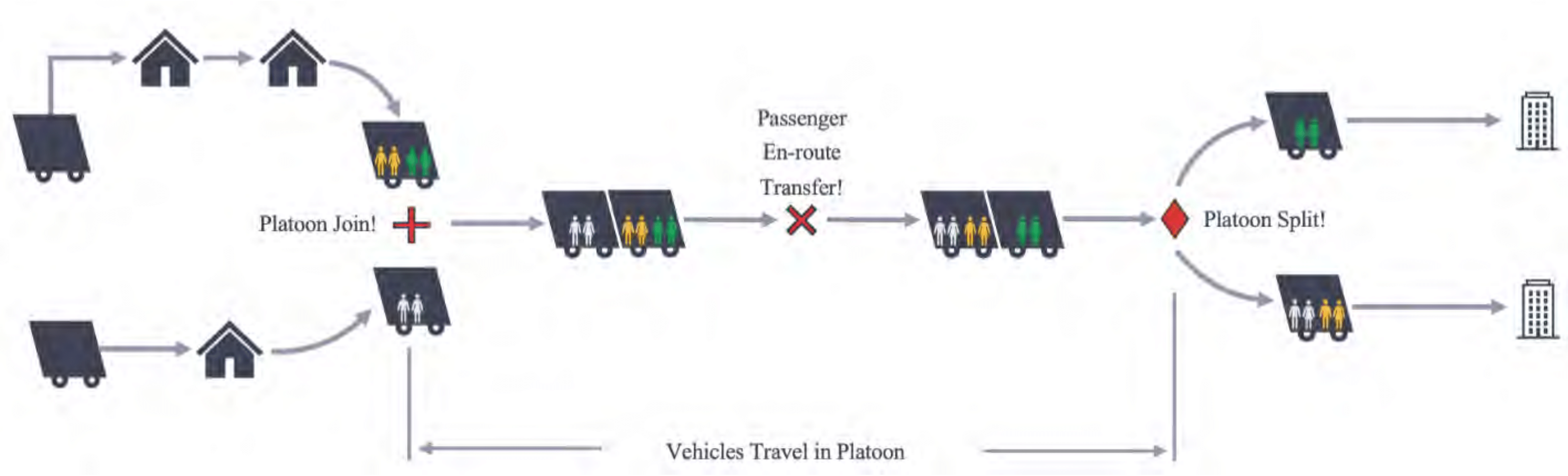
Advances in Static and Dynamic Pickup and Delivery Models
Joseph Chow March 23rd, 2023, 16h15, Lecture Hall D
With advances in technologies enabling ridepooling, automated vehicles, and artificial intelligence, there has been a resurgence in interest in pickup and delivery-related problems in many fields of logistics, transport planning, and optimization. In this talk I will present some of our lab’s recent innovations in this topic area. We start with static routing models. A Dial-a-Ride Problem (DARP) can be extended to include pricing with elastic demand; revenue management strategies can be designed in this context. DARP can also be extended to include synchronized transfers for passengers, and with the right modular vehicle technology can benefit from platooning vehicles. In dynamic routing or ridepooling, cost function approximation (CFA) policies can be designed using queueing approximation for servers. Applications include dynamic pricing and routing, and last mile integration with transit systems. A CFA policy is also designed for routing with transfers for MOIA’s ridepooling fleet, which demonstrates the opportunity costs of transfer commitments. Finally, we show how routing models integrated with recommender systems can turn mobility services into “next-gen physical internet search engines”.
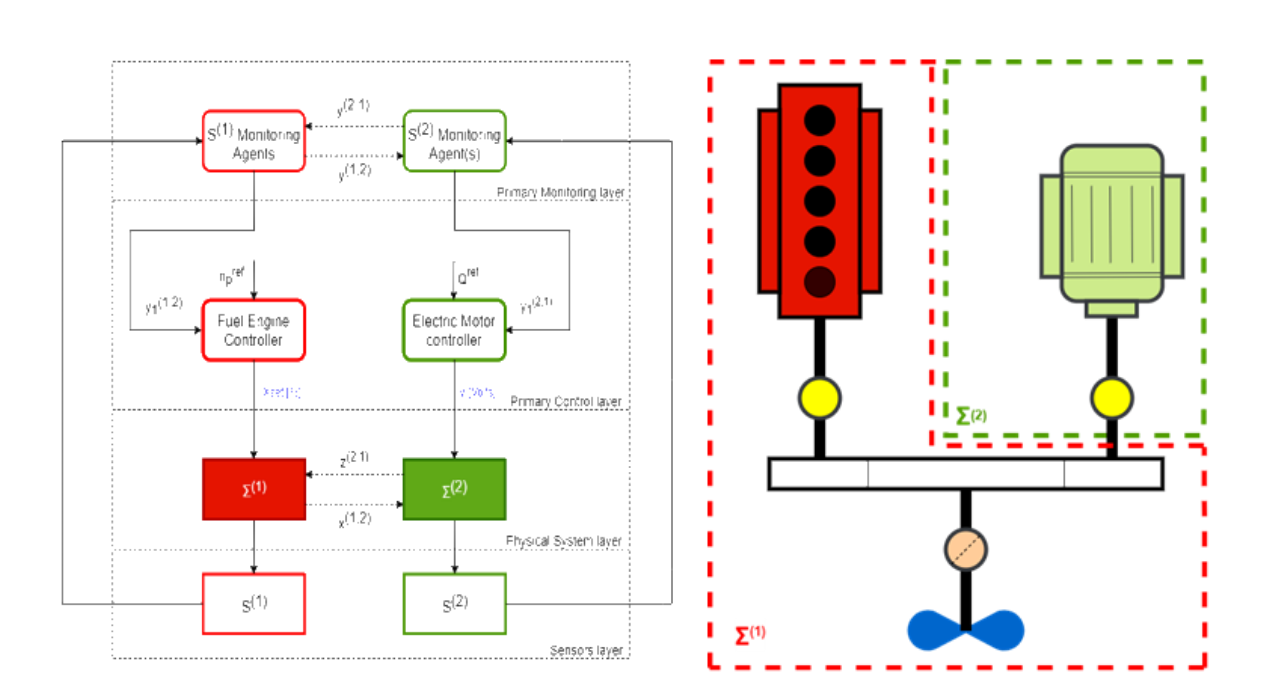
A Multi-Sensory Switching-stable Architecture for Distributed Fault Tolerant Propulsion Control of Marine Vessels
Nikos Kougiatsos March 16th, 2023, 16h15, Lecture Hall F
Nowadays, marine vessels constitute safety-critical assets facilitating the transport of millions of passengers and tons of cargo worldwide. As such, they require a large number of heterogeneous sensors dispersed in the various on-board machinery for operational and condition monitoring of their vital systems, such as the propulsion system. Despite the vast availability of data from on-board sensors, there is hardly any collaboration between the spatially distributed sensor devices to boost vessel performance. Up to this day, physical redundancy has been mostly discussed in maritime literature and has also been required by certain ship system design regulations. The use of virtual sensors (software-based) has not been properly investigated yet for maritime applications, despite their successful application in other fields like aircraft control and process control. This paper proposes a novel switching mechanism to alternate between physical and virtual sensors used in the primary propulsion control layer of marine vessels aiming to compensate for the effects of sensor faults. The switching mechanism focuses on ensuring the safe performance of the propulsion grid after the sensor faults occur. The software sensors are constructed using mathematical models describing the nonlinear dynamics of the propulsion system and the input and sensor output data. Simulation results are used to illustrate the switching mechanism’s performance in the case of a hybrid propulsion system, where the different subsystems are controlled in a distributed configuration.
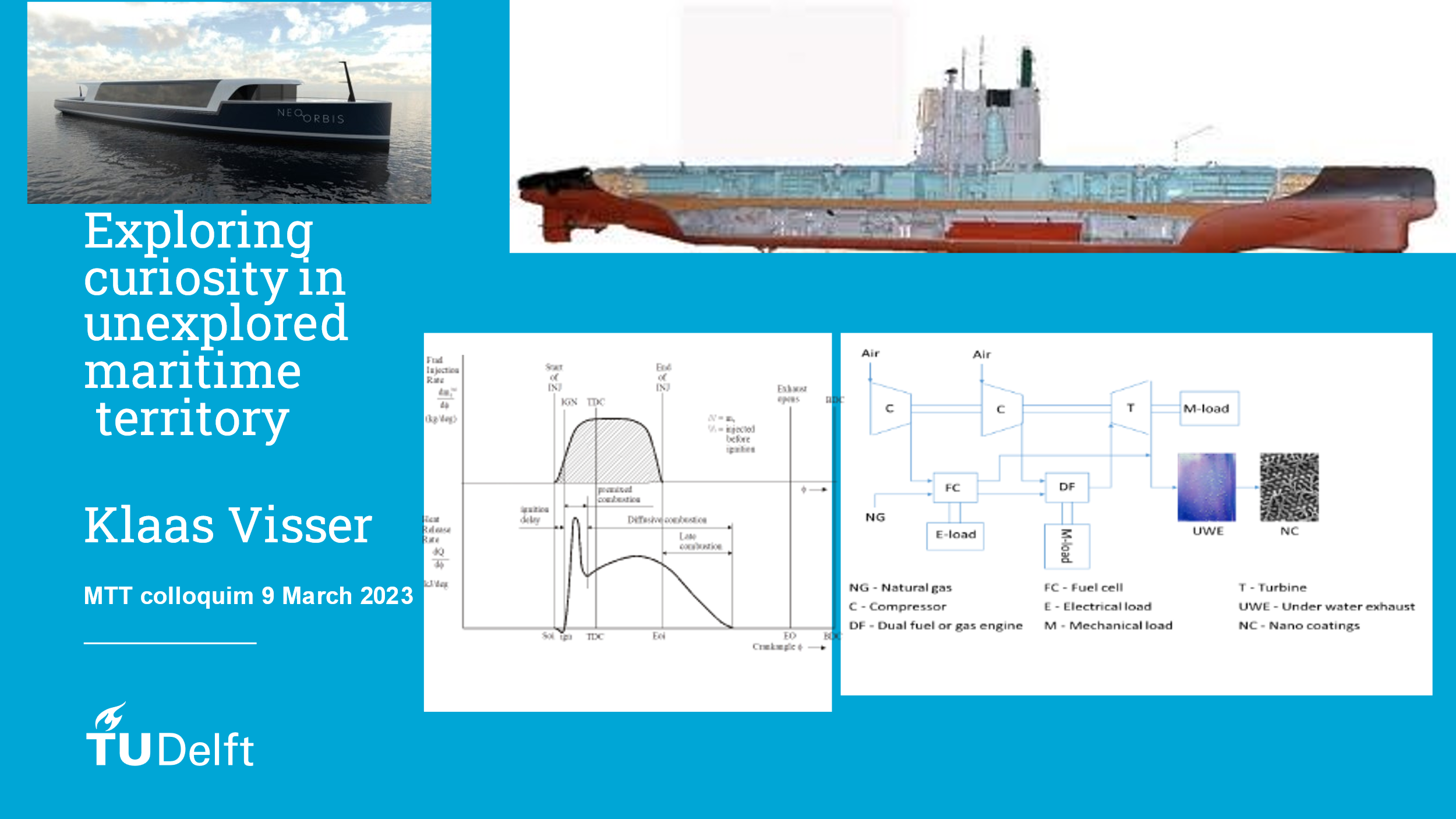
Exploring curiosity in unexplored maritime territory
Klaas Visser March 9th, 2023, 16h15, Lecture Hall D
It will cover some personal professional experiences of personal naval career and the present research topics of our Marine Engineering section.
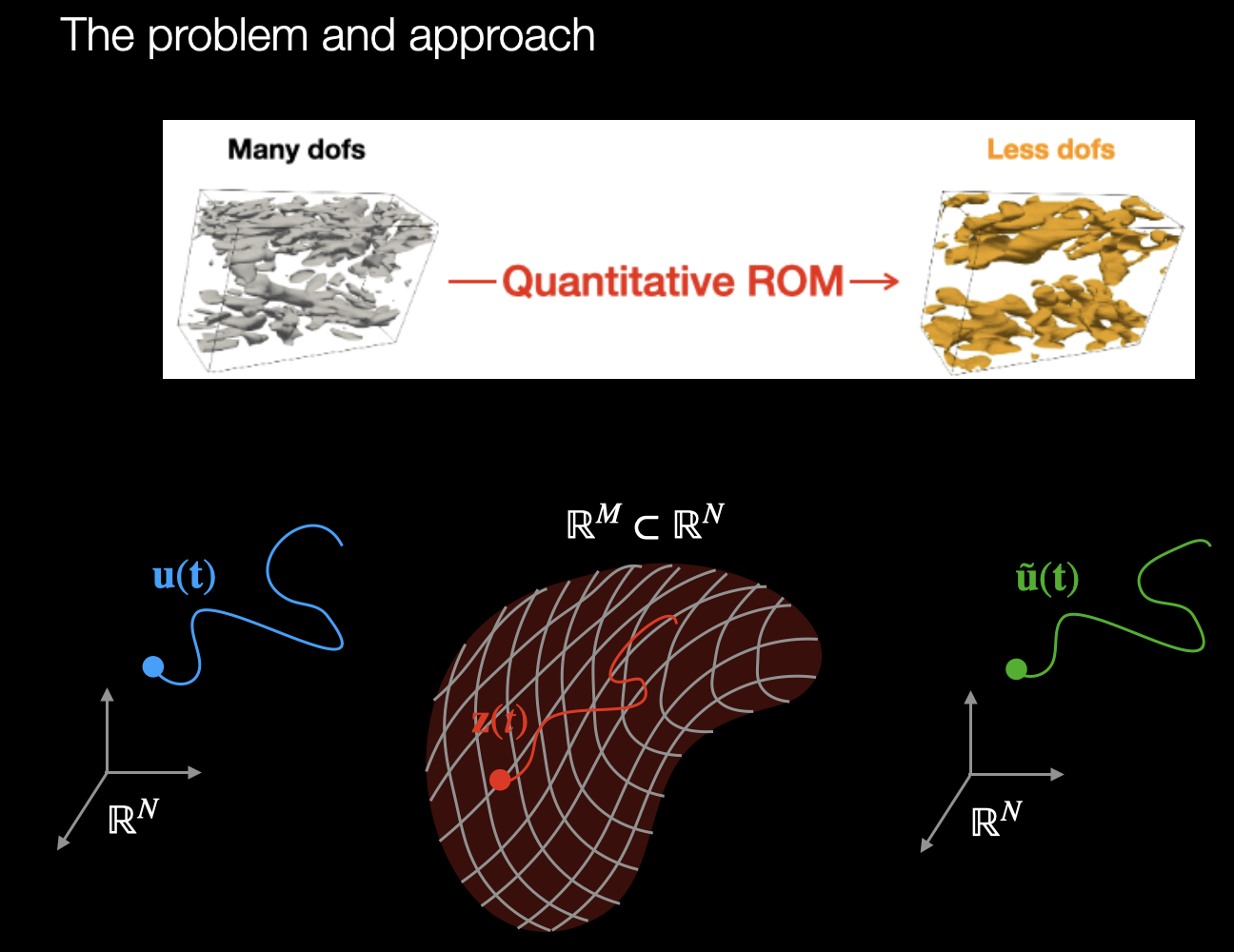
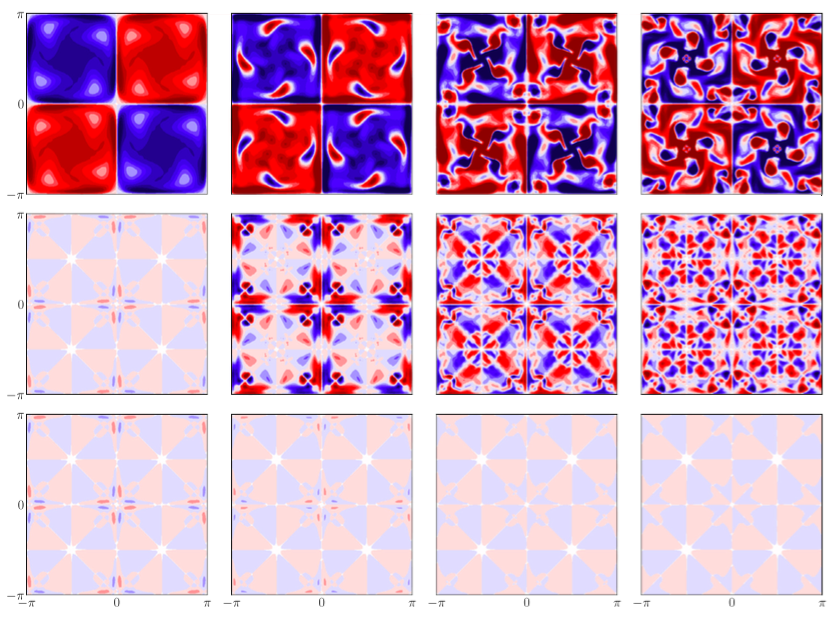
Interpretable Nonlinear Reduced-Order Modelling with Autoencoders
Luca Magri February 16th, 2023, 16h15, Lecture Hall G
Autoencoders are machine-learning methods that enable a reduced- order representation of data. They consist of an encoder, which compresses the data in a latent space, and a decoder, which decompresses the data back to the original space. If only linear operations are performed during the encoding and decoding phases, an autoencoder can learn the principal components of the data. On the other hand, if nonlinear activations functions are employed, an autoencoder learns a nonlinear model of the data in the latent space. The interpretability of the latent space, however, is not yet fully established. In this work, we physically interpret the latent space with simple tools from differential geometry. The interpretation is employed on canonical turbulent flows, i.e., the Kolmogorov flow and the minimal flow unit. The results show that the autoencoder learns the optimal submanifold in which the reduced-order dynamics is well represented. The latent variables are exploited for reducing the model's complexity whilst keeping optimal accuracy on the spatiotemporal dynamics. This work opens opportunities for extracting physical insight from the latent space and for nonlinear model reduction.
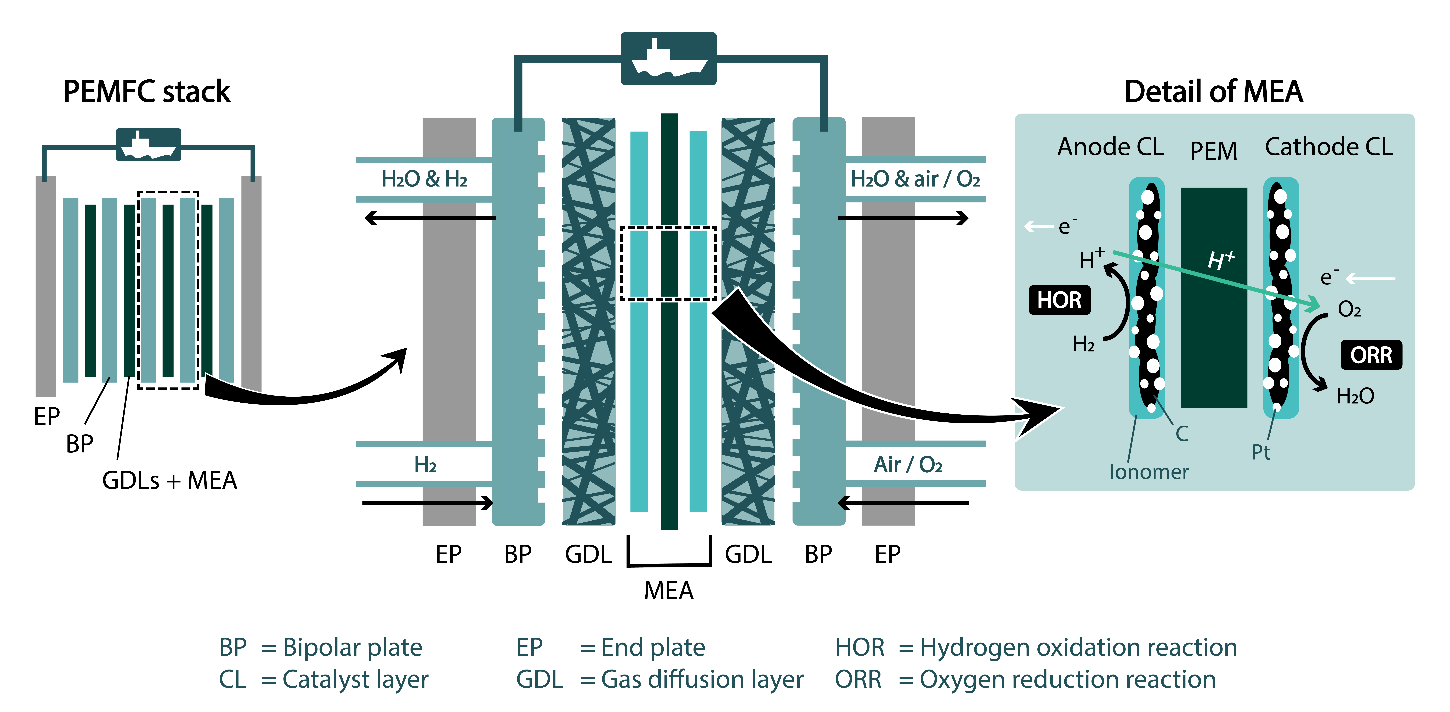
Proton Exchange Membrane Fuel Cell degradation in a marine context
Annabel Broer February 16th, 2023, 16h15, Lecture Hall G
Degradation of PEMFCs is commonly studied in automotive applications. The maritime environment is seldom considered, while it may strongly affect the type and extent of damage. In my PhD we categorize different degradation mechanisms and translate them to the maritime field. More specifically, we study the impact of salinity and vessel motions on PEMFC durability. Via a literature study, a MATLAB degradation model and experimental work we eventually aim to aid engineers and ship owners, allowing them to monitor different types of damage, and adapt ship design and operation to enhance the PEMFC lifetime.

Learning and Collaboration Methods for Net-Zero and Human-Centered Maritime & Transport Operations
Frederik Schulte February 9th, 2023, 16h00, Lecture Hall H
New learning and collaboration methods are needed to address major research challenges in the transitions to net zero and a human-centered Industry 5.0. In this presentation, I give an overview of my research on (combinatorial) optimization techniques in conjunction with collaboration models (multi-agent systems and game theoretic approaches to represent different actors) and learning models (mainly different variants of reinforcement learning) applied to maritime/ port, hinterland, and industrial (transport) operations. On the other hand, similar collaboration and learning approaches are also needed in transdisciplinary research (as recently emphasized by NWO) projects targeting major societal challenges such as climate change or human-AI collaboration. Since this seems quite relevant for a large diverse department such as M&TT, I also highlight these forms of collaboration in the presentation and hopefully stimulate some related discussion.
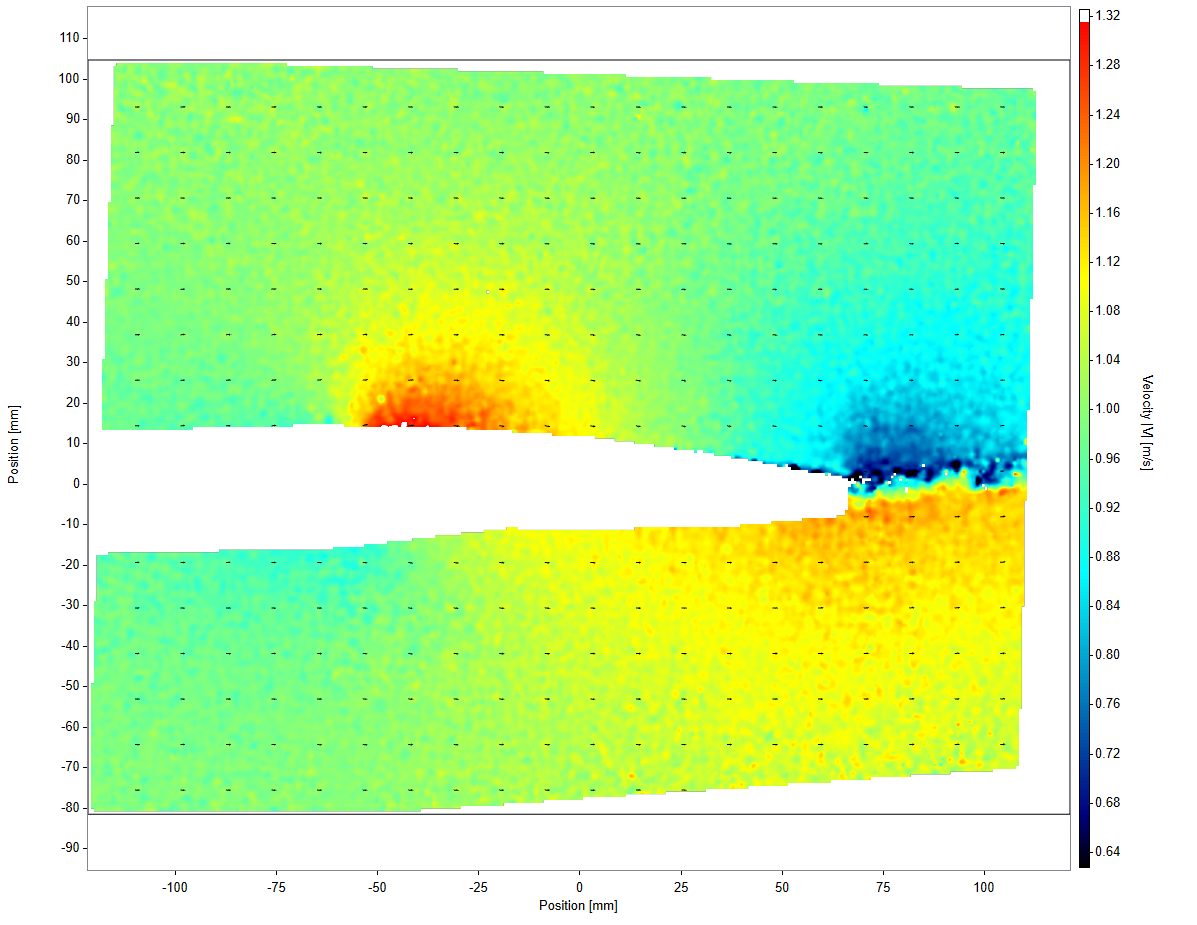
Lift control of hydrofoils – PIV of lift control systems
Vasu Krishnan January 19th, 2023, 16h00, Lecture Hall M
Hydrofoil craft provides fast and economical transport, in particular, in dense urban areas and offshore applications. However, the primary challenge in commercial applications is maintaining a constant ride height during operation and thus requiring some method of ride height control that needs to be designed in the craft. Various lift control mechanisms were explored from the literature and open areas for research are identified that need to be focused on to better understand the flow around the foil and the lift actuator. A preliminary experiment is conducted on a NACA 0012 foil to establish a baseline and understand the flow field in fluctuating conditions (forced heaving foil). Particle Image Velocimetry (PIV) is used for quantitative visualization of the flow field. The current experiment also focuses on developing algorithms that aid in processing the images acquired through this experimental technique. Other experiments that are planned for the future are also explained in the presentation.
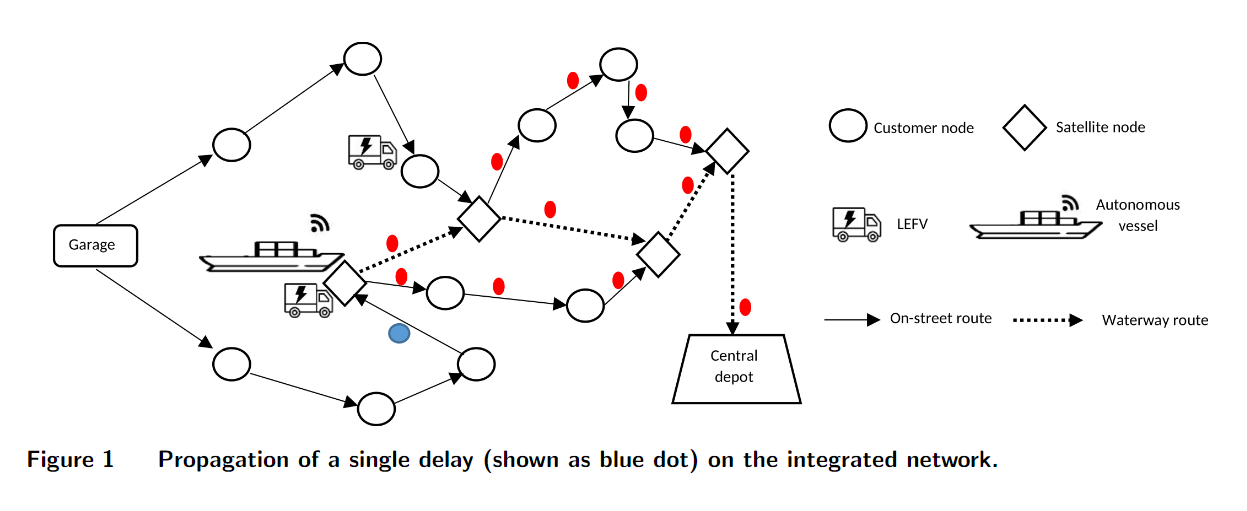
Two-echelon multi-trip vehicle routing problem with synchronization for an integrated water- and land-based transportation system
Cigdem Karademir January 19th, 2023, 16h00, Lecture Hall M
This study focuses on two-echelon synchronized logistic problems for integrated water- and land-based transportation systems in order to improve the effectiveness of reduced-capacity vehicles such as electric vehicles, e -cargo bikes, hybrid vehicles, etc., and ultimately reduce congestion issues in cities. We propose a new mixed integer linear programming (MILP) formulation of a two-echelon multi-trip vehicle routing problem with time windows and satellite synchronization (2E-MVRPTW-SS) that aims at optimizing the transfers and satellite assignments to reduce overall logistics costs by finding the best routes for street vehicles and vessels. A Logic-based Benders Decomposition (LBBD) method is proposed to solve the problem at street and water levels iteratively by efficiently adding cuts and bounds. Computational experiments show that the LBBD outperforms MILP in terms of solution time and quality for even smaller instances with up to 20 customers. Also, from a practical view, we provide sensitivity analysis on different logistic systems and insights into designing cost-effective intermodal systems to increase livability of urban areas.
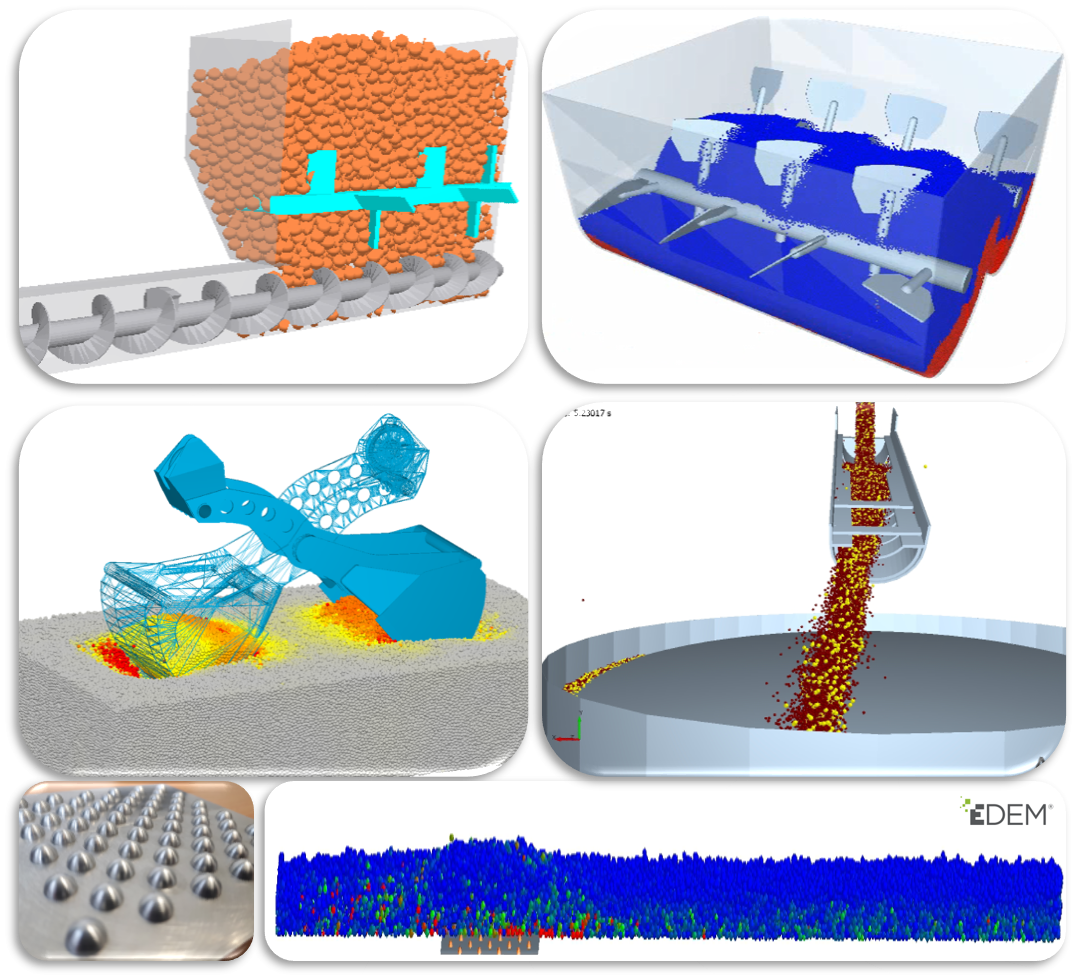
Towards SMaRTGranTech – the role of Machine Cargo Interaction in granular handling systems
Dingena Schott January 12th, 2023, 16h00, Lecture Hall M
Transport and material handling is indispensable in every industry and needs a set of machines to move cargo from place to place. Different cargo types such as standardized boxes, raw materials, semi-processed goods, liquids and piece goods require dedicated machines for handling. The design of machines to transport these cargo types are different since their specifics are determined by the char-acteristics of the cargo types, varying from standardized unit load devices to granular materials and liquids, to break bulk as large or heavy pieces with odd shapes such as wind turbine blades. The ma-chines operating today are based on traditional (experienced trial-and-error based) designs and dedi-cated for specific goods only. The future will see a larger variation in types of materials that need to be handled, also in view of the energy transitions. At the same time, it is currently unclear which specific types of materials, and at what times. The key challenge here is to develop systems that can adapt to varying cargo properties by developing models that capture machine-cargo interaction. Such systems that can adapt have the potential to be more efficient, sustainable and use significantly less raw materials. While the world moves towards cyber-physical systems integrating the dynamics of the physical processes with those of computation and networking, systems that transport and process granular materials are far from ready to be connected. This talk discusses how in depth knowledge and modelling of Machine Cargo Interaction contributes to the transport systems of the future.
Monitoring of dynamic loads and acoustic emissions in composite marine propellers using embedded piezoelectric sensors
Arno Huijer December 15th, 2022, 16h15, Lecture Hall M
Flexible composite marine propellers have the potential to reduce the electromagnetic and acoustic signatures of maritime vehicles, as well as reducing their carbon emissions [1], [2]. There are however large uncertainties in the material properties and damage progression in composite materials. In-service monitoring of loads and damage to the blades may provide useful input for improved operation and estimation of the remaining lifetime [3]. This presentation will highlight current progress on the measurement and analysis of vibrations and acoustic emissions (AE) in composite marine propeller blades using a network of embedded piezoelectric sensors. In this regard, a framework is shown for the reconstruction of vibrations, together with preliminary measurements on blade in dry condition. Further, the measurement and processing of AE signals is outlined. This is aimed at damage localization and characterization. Considerations concerning the non-homogeneity and anisotropy of the propeller blade are explained. Initial results on AE measurements from the blade are also displayed.
References:
[1] Young, Y. L., Motley, M. R., Barber, R., Chae, E. J., and Garg, N., (Nov 2016), “Adaptive composite marine propulsors and turbines: Progress and challenges,” Appl. Mech. Rev., vol. 68, no. 6
[2] Maljaars, P., Bronswijk, L., Windt, J., Grasso, N., and Kaminski, M., (2018), “Experimental validation of fluid-structure interaction computations of flexible composite propellers in open water conditions using BEM-FEM and RANS-FEM methods,” J. Mar. Sci. Eng., vol. 6, no. 2
[3] Huijer, A., Zhang, X., Kassapoglou, C., and Pahlavan, L., (Jul 2022), “Feasibility evaluation for development of composite propellers with embedded piezoelectric sensors,” Mar. Struct., vol. 84, p. 103231
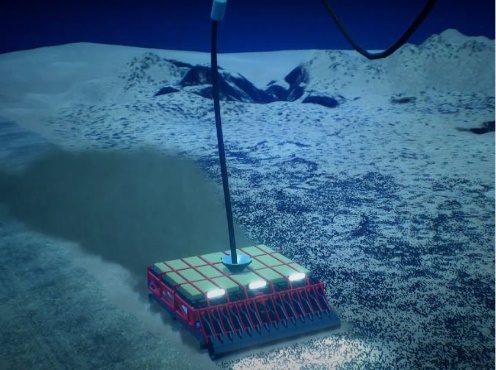
Effect of Flocculation on dispersion of turbidity flows
Shaheen Wahab December 1st, 2022, 16h15, Lecture Hall M
The global population is increasing and due to which there will be a surge in energy and materials demand worldwide. The transition from fossil fuel based technologies to clean energy technologies is crucial in order to maintain a low carbon future. Clean energy technologies are metal intensive which requires critical raw materials such as nickel, cobalt and rare earth metals. Due to depletion of mineral deposits and reduction of ore grade of the land based mines, the industry is compelled to look for alternative resources for these materials. Thus, deep sea mining is looked at a viable option. Deep sea mining impose threat to the deep-sea environment due to the generation of sediment plumes which could potentially eradicate benthic communities living in the deep sea. It is expected that flocculation will help in reducing the sediment dispersion due to deep sea mining, which will be studied in this research.
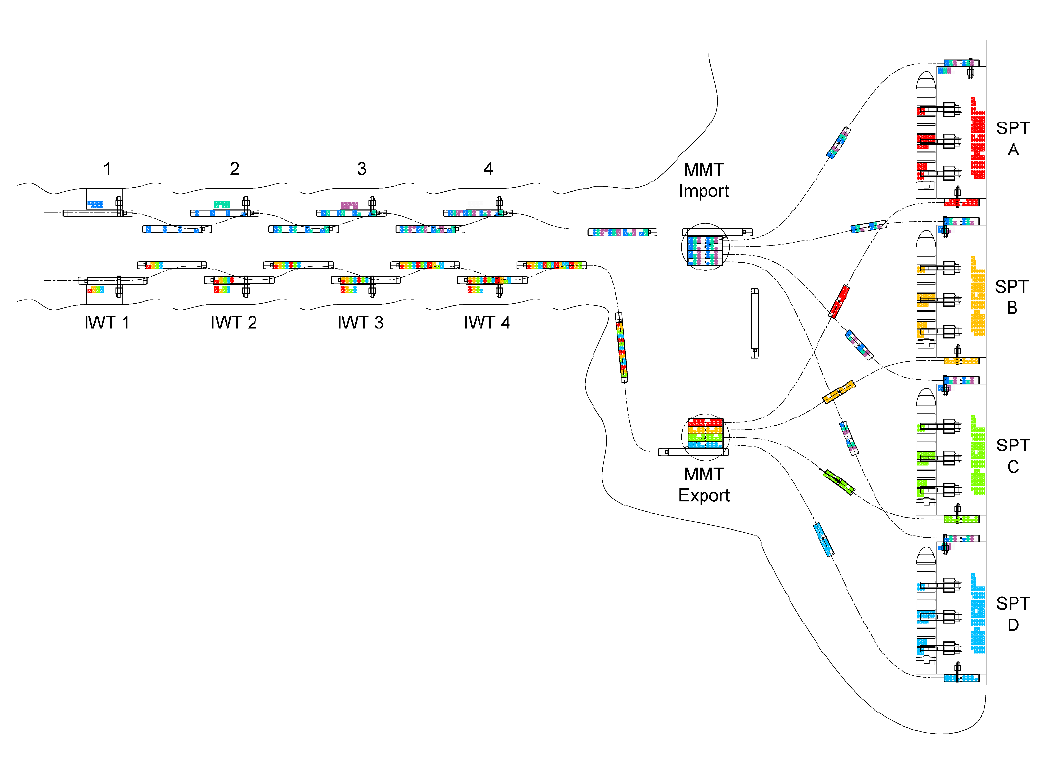
Development of a modular terminal concept for container barging in seaports: a time and cost evaluation framework
Adrien Nicolet November 17th, 2022, 16h15, Lecture Hall M
Container transport via inland waterways currently faces several challenges affecting its competitiveness with other modes. These challenges include the high waiting times and the low priority given to container barges in deep-sea ports. To mitigate these challenges, a new concept known as the Modular Mobile Terminal (MMT) is introduced to create a dedicated floating barge handling and consolidation space for containers. Based on this, an evaluation framework examining the feasibility of the MMT from a logistical and economic perspective is proposed. In particular, a time optimization model was developed to determine the MMT configuration leading to the most time savings for container barges. It also helps targeting a potential market by determining the hinterland flows that can be positively linked to the MMTs. Afterward, an economic evaluation is conducted to estimate the cost savings for the actors and figure out under which conditions the actors would benefit from using the MMT system. It can be concluded that the MMTs are most suitable for handling and consolidating cargoes from container barges with small call sizes.

Hydrodynamics of Multi Phase Flows in Marine Propulsion
Tom van Terwisga, Cornel Thill, Lina Nikolaidou and Rens Stigter, November 10th, 2022, 16h00, Lecture Hall M
This meeting aims to give you a sneak preview of some of the questions and hidden secrets of multiphase flows as they occur on a cavitating propeller or underneath an air lubricated hull.
The structure of this mini-symposium is that we will start with an introduction into the issues in multiphase flows as well as the TU Delft response on the corresponding challenges through our brand new Multi-Phase Flow Tunnel, opened in 2022. This introduction will be followed by presentations on Drag Reduction by Air Lubrication and on Cavitation Inception and Water Quality.
Presentations:
- Developments in Cavitation and Air Lubrication Research by Tom van Terwisga and Cornel Thill
- Dynamics of transitional air layers for friction drag reduction by Lina Nikolaidou
- Cavitation Inception and Water Quality Effects by Rens Stigter
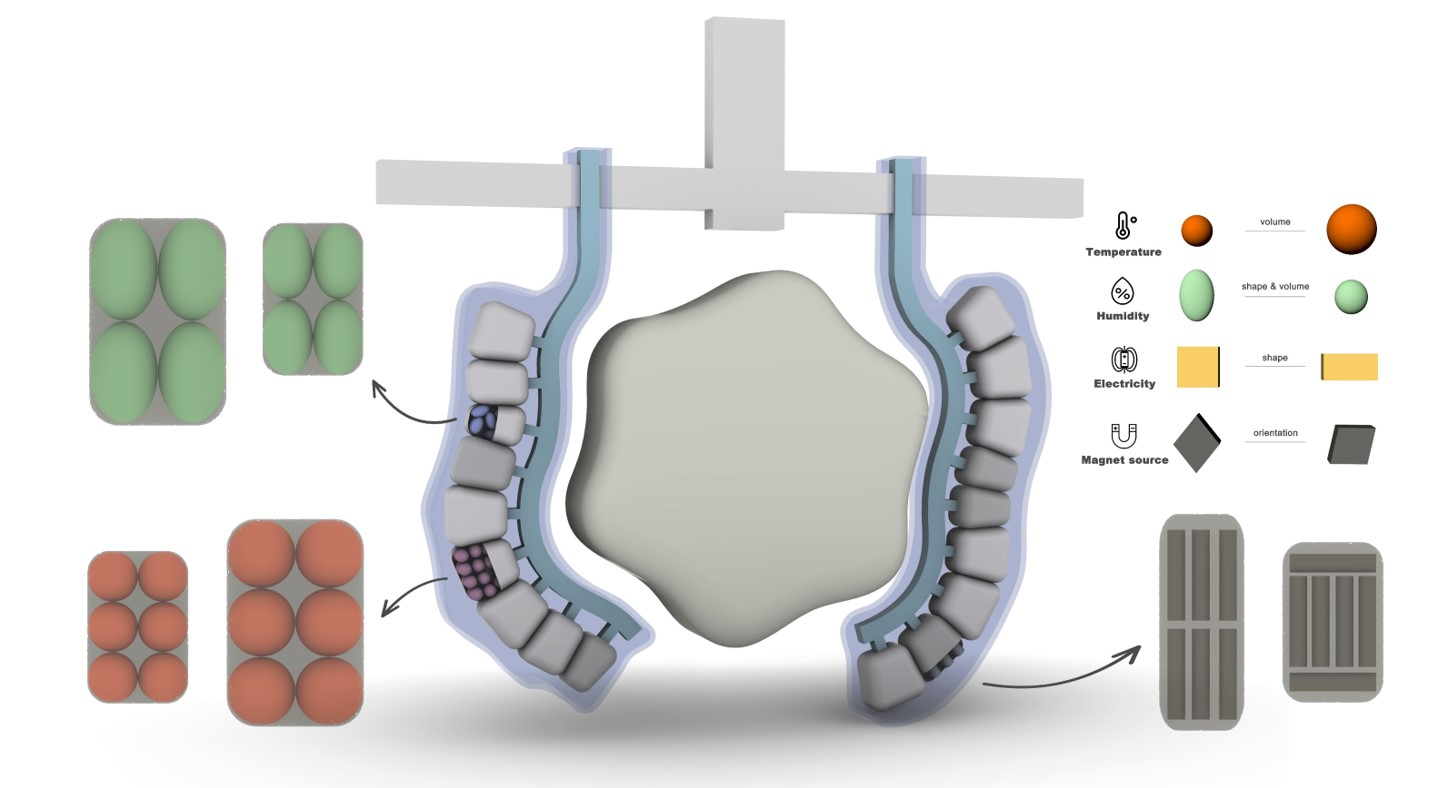
Soft Grasping-gripper Design with Actively Stimulated Particles
Aaron (Qianyi) Chen, November 3rd, 2022, 16h15, Lecture Hall G
Soft grippers show adaptability and flexibility in grasping irregularly shaped and fragile objects. However, small-scaled deformation, low loading capacity, and limited shaped fitting ability of the soft grippers are the main limitations for the development of large-scale applications, especially for heavy objects or objects with sharp edges. To overcome the limitations, a new concept of a soft actuator with engineered smart particles is proposed. The proposed soft actuator is a dual-chambers structure filled with different particles, which can be driven by particle expanding or covered membrane shrinking. Compared to the other soft actuators, the combination of granular materials and smart materials is used in the new concept instead of the traditional actuation method, which delivers better performances of large-scale deformation, variable stiffness, and high-level adaptability. To describe the concept, a numerical method of the coupling of the discrete element method (DEM) and the finite element method (FEM) is presented to achieve the design and investigate the influent factors. The results indicated, that the proposed soft gripper exhibited the functionality of large deformation by a shrinking membrane or deformed particles. In general, in a certain range, the bending angle and deflections of the gripper actuator increase with the growth of particle diameter ratio, actuator length, and elastic modulus of membrane material. However, the bending angle will decrease when the membrane's actuator length and elastic modulus increase after a certain level. Hence, the choice of different parameters needs to be reasonable to achieve the required deformation. In conclusion, the grasping gripper actuator can realize the large bending deformation but performs differently under different influence parameters. Thus, the proposed novel actuator shows potential for the development of soft grippers in multi-scale physical scenarios.

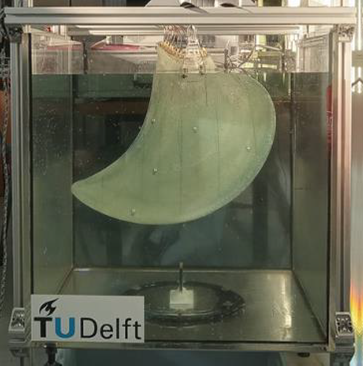
Extreme aerated water-wave impacts on floating bodies: The relevance of air content in water on ship design loads
Martin van der Eijk, October 20th, 2022, 16h15, Lecture Hall M
The past showed that offshore structures still experience catastrophic impact loadings, even though they are designed according to the regulations. The complexity of water wave events interacting with other substances, like structures and air, makes it hard to predict the design loads. An example is a breaking wave that encloses air pockets. These pockets fragment into smaller ones, air entrainment, which can remain for a long time in the water. Where pure water is (almost) incompressible, the air is the opposite, affecting the properties of the air-water mixture. In my Ph.D., which has been going on for almost four years, I developed a numerical CFD method from scratch for modeling wave impacts. The model can deal with the properties of a homogeneous air-water mixture and shows promising results compared to the experimental results of an in-house setup. During the four years of my Ph.D., I took some side roads to improve the numerical method for e.g. high-density ratio interfacial flows, fluid-structure interaction, and continuous geometrical interface reconstruction. Out of my comfort zone, an experimental setup for a 2D wedge entry in “homogeneous” aerated water is designed.

Choices and challenges in an academic career – a personal story of an electrical power engineering professor
Henk Polinder, October 13th, 2022, 16h00, Lecture Hall M
As researchers in academia, we are continuously faced with choices and challenges. Do I want an academic career? What is the best next step? Am I good enough? Where and how can I make a contribution? Why do reviewers not understand my excellent work? Sometimes we have successes, most of the time, we are struggling. During this presentation, I want to share something of my own choices and challenges. I am convinced this will give some insight into the beauty of electrical power engineering. I also hope this will stimulate thinking about how (not) to develop an academic career.
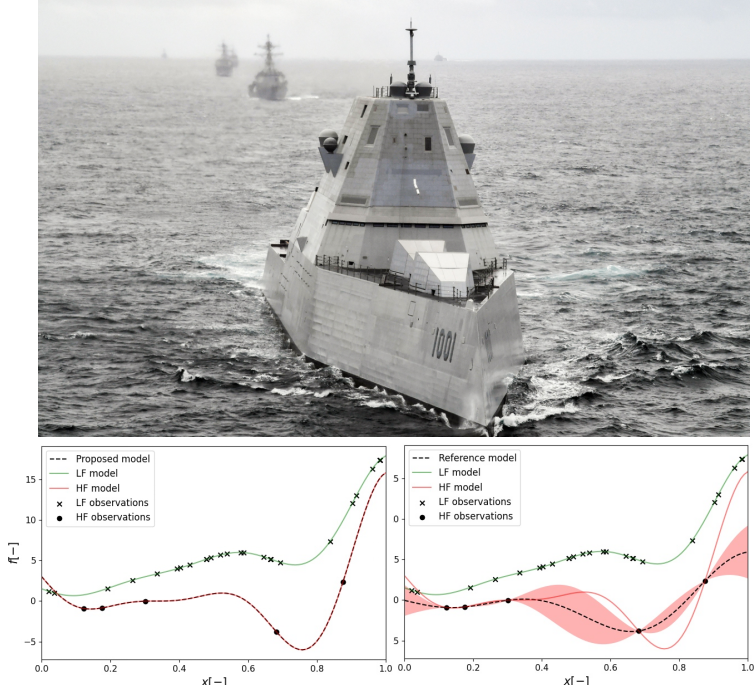
Multi-fidelity Probabilistic Design Framework for Novel and Reliable Vessels
Nicole Charisi, October 6th, 2022, 16h15, Lecture Hall M
Early-stage design of complex systems, such as naval vessels, is considered by many to be one of the most critical design phases because many of the major design decisions are being made, and as a consequence, most of the costs are committed. The naval architect needs to assess a large amount of designs to identify the most promising trends and key trade-offs. Traditionally, the fidelity of the analysis tools, used to assess the designs, increases gradually throughout the design process. Thus, early-stage exploration is based on low fidelity tools such as simplified physical models, data from reference designs, empirical and semi-empirical methods. However, low fidelity tools are not sufficient for the design of novel vessels. Introducing high fidelity tools earlier on in the process is a challenge which can be addressed by introducing multi-fidelity models (MFMs). My PhD work is part of a NWO funded project, which aims to assess extreme wave loading early on in the design process. My research aims to develop a multi-fidelity framework to support early stage design exploration of novel and reliable vessels.
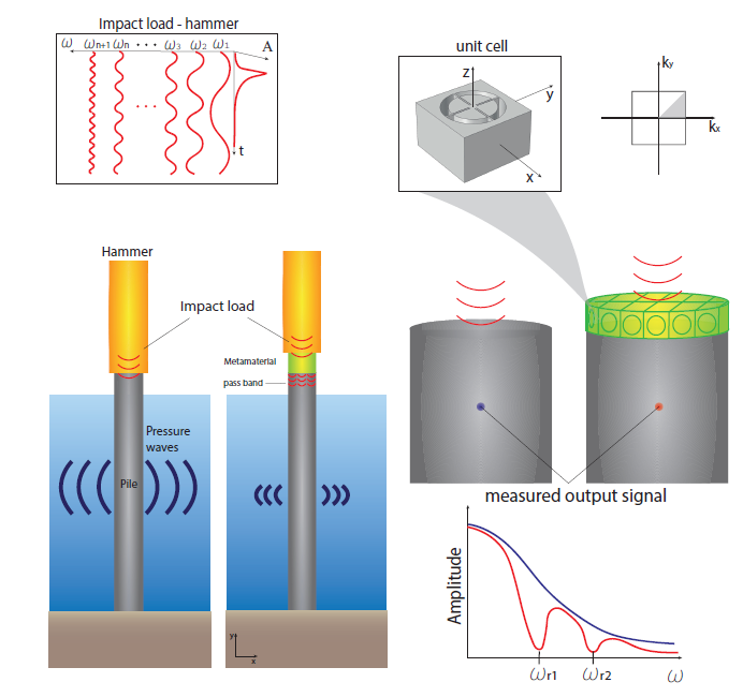
A metamaterial-based device for noise attenuation during pile driving process
Ana Carolina Azevedo Vasconcelos, September 29th, 2022, 16h15, Lecture Hall F
It has been stated that noise is one of the main causes of not only structural damage but also hearing injury to species living around the noise source. A well-known noise problem is the sound produced by the process of driving an offshore monopile into the seabed, which is a common foundation used during the installation of wind farms. The current noise-control techniques used in this process still face challenges in reducing low-frequency noise, which can also be harmful to marine life. To overcome this limitation, this project proposes an elastic metamaterial-based structure composed by single-phase resonant structures. The proposed structure will be used to remove energy from the input signal related to high noise levels. The presented device opens the door for the development of less complex structures with potential in reducing noise directly from the source.
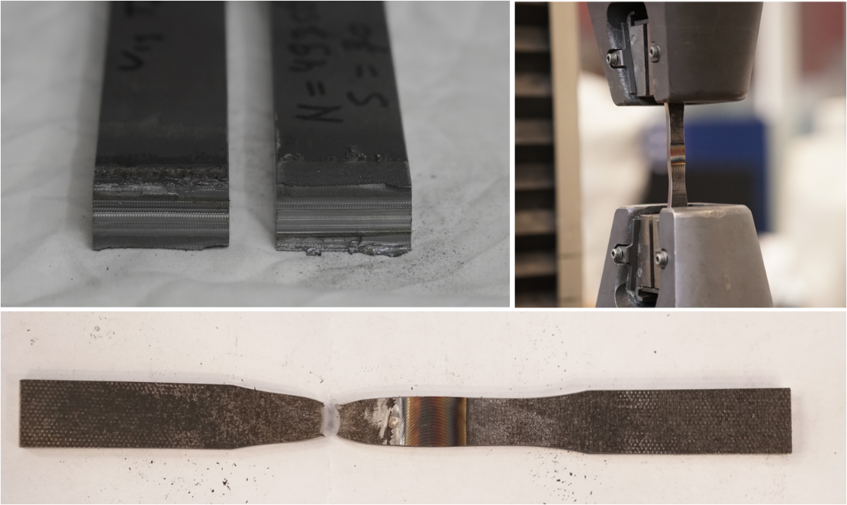
Mechanical behaviour of friction stir welded joints in steel
Niels Troost, September 22nd, 2022, 16h15, Lecture Hall F
Welded joints are often weak links in structures. Friction stir welding, originally developed for softer materials like magnesium and aluminium, has shown to be a very promising technique for manufacturing as well as weld repairs. However, friction stir welding in steel comes with its own set of problems. One of which is that steel undergoes phase transformations during the process, meaning that the mechanical properties of the material change. Moreover, the resulting mechanical properties of the joint depend on the welding parameters, such as the welding speed and rotation speed of the tool. Mechanical properties of friction stir welded joints in steel are not well understood. The project goal is to characterize and optimize the mechanical performance of friction stir welded joints in steel maritime structures. The current research is focused on static strength, fatigue strength and microstructural properties of friction stir welded joints in steel.
Mensen vs Machine: Learning Unsteady Hydrodynamics
Gabriel Weymouth, September 15th, 2022, 16h15, Lecture Hall J
In the last decade machine learning has become a buzzword in scientific modelling, but is this really a new universal approach or just a way to get new papers using regression methods that are 200 years old? In this presentation, I’ll highlight a few examples of the capabilities and limitations of applying modern machine learning to solve unsteady hydrodynamic problems. These range from the deseptively simple underwater pendulum to the well know open problem of predicting the forces induced by the turbulent wake of a circular cylinder. I will also discuss the critical role of the user in defining the problem representation and in applying the right machine learning tool for the right problem.